
Louis Wiesmann: Efficient LiDAR-Based Mapping and Localization in Outdoor Environments (PhD Thesis)
Short 3-min video about Louis Wiesmann’s PhD thesis

Studienfeld – Informatik, Ingenieurwissenschaften | Uni Bonn
Mehr Infos zum Studienfeld: https://www.uni-bonn.de/de/studium/studienangebot/studienfelder/studienfeld-informatik-ingenieurwissenschaften ➡ Noch mehr von der #unibonn: Instagram: https://www.instagram.com/universitaetbonn/ LinkedIn: https://www.linkedin.com/school/rheinische-friedrich-wilhelms-universit%C3%A4t-bonn Bluesky: https://bsky.app/profile/unibonn.bsky.social Facebook: https://www.facebook.com/unibonn Webseite: https://www.uni-bonn.de

Your workplace Earth – as a Weltvermesserer world surveyor
Discover your passion for surveying and shape the world of tomorrow! Our junior surveyor campaign “Weltvermesserer” offers you the opportunity to explore a fascinating field of work and soon live your calling. Because surveying is more than just numbers and coordinates – it is the foundation for urban planning, construction, and environmental protection. With state-of-the-art technology and innovative methods, surveying engineers are changing the way we perceive and shape our environment. Would you like to be part of this exciting development? Let our promotional video inspire you! Experience how surveying lays the foundation for major projects and how the surveying industry pushes the boundaries of what is possible. From surveying urban spaces to digitally mapping uncharted territories, surveying engineers are the pioneers of a new era. Join us and discover your strengths in the field of surveying. Whether you are interested in geodesy, cartography, or geoinformatics, this profession offers you diverse opportunities to develop yourself and work in a dynamic team. Utilize your skills to survey the world according to your vision. Be a pioneer in the surveying industry and make a difference in advancing climate projects, modern city planning, or sustainable transportation solutions. Together, we shape the future, because surveying is the foundation for progress and innovation!

DigiForest: Reconstructing trees in the forest with a hand-held sensor box.
Digital reconstruction of frees in the forest by estimating the trajectory using a 3D LiDAR+IMU odometry system and then using the resulting trajectory and point cloud to initialize a 3D Gaussian splatting reconstruction using the camera images in addition. This work was conduction in the context of the DigiForest EU project.
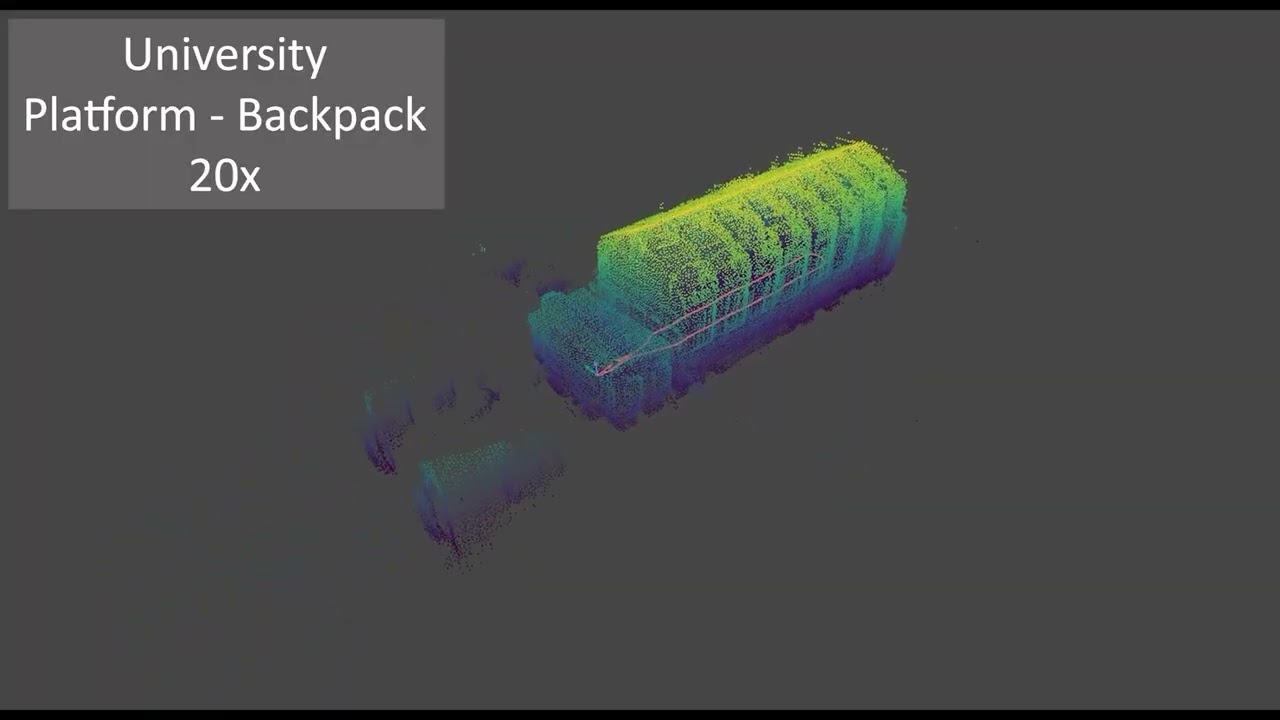
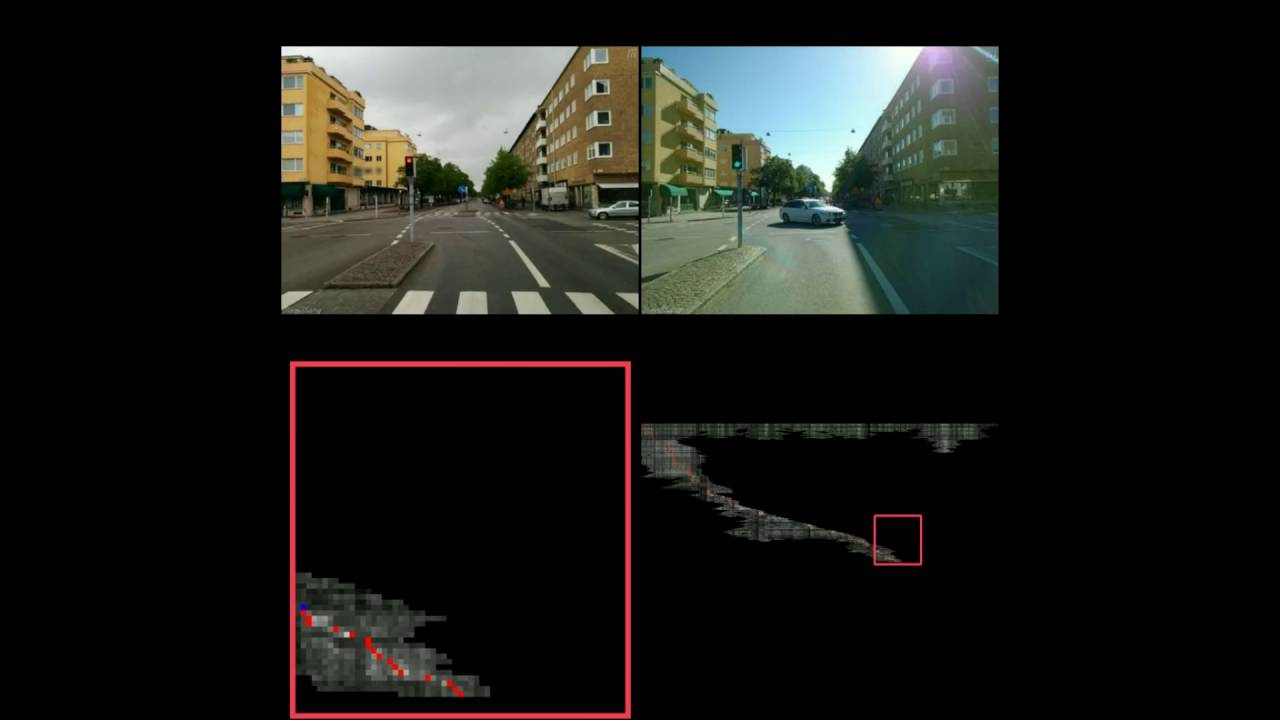
LiDAR-Inertial Odometry Demo Using Multiple Multiple Platforms (RKO LIO by Meher Malladi et al.)
LiDAR-Inertial Odometry Without Sensor-Specific Modelling Paper and code available (below). 00:00 Car city driving with an underpass 00:20 Car city driving with multiple tunnels 00:51 Quadruped walking on parking lot 1:12 Backpack mapper at university college with indoor to outdoor transition 1:27 Backpack mapper at university college outdoors with an overhead perspective 1:44 Backpack mapper in a forest The platforms from which the data has been collected, in order, are: Car – IPB Car, using Ouster OS1-128 and built-in InvenSense IMU. Quadruped – Leg-KILO dataset, using Velodyne VLP-16 and onboard unspecified IMU. Backpack (University) – Oxford Spires dataset, using Hesai QT64 and Alphasense IMU. Backpack (Forest) – DigiForests dataset, using Hesai XT32 and Alphasense IMU. Code: https://github.com/PRBonn/rko_lio Paper: https://arxiv.org/abs/2509.06593 A Robust Approach for LiDAR-Inertial Odometry Without Sensor-Specific Modeling by Meher V.R. Malladi, Tiziano Guadagnino, Luca Lobefaro, and Cyrill Stachniss PDF: https://arxiv.org/abs/2509.06593
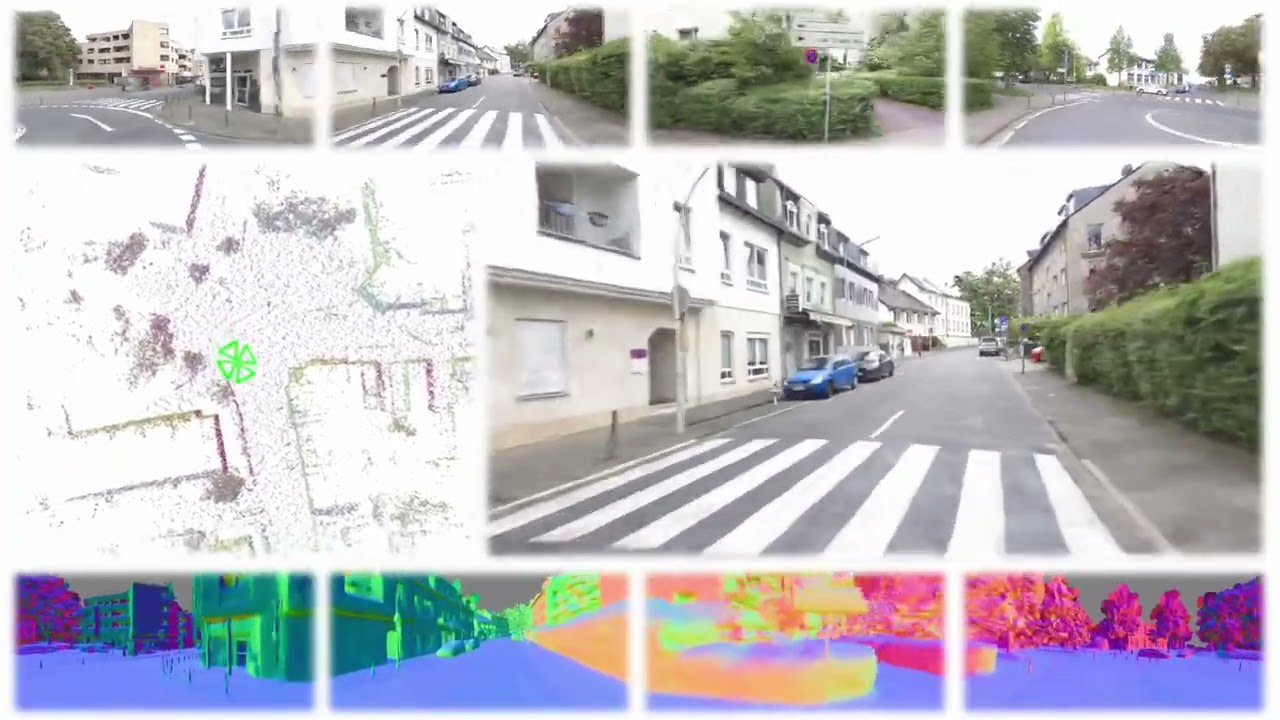
1min PINGS Demo: Gaussian Splatting Meets Distance Fields within a Point-Based Implicit Neural Map
Y. Pan, X. Zhong, L. Jin, L. Wiesmann, M. Popović, J. Behley, and C. Stachniss, “PINGS: Gaussian Splatting Meets Distance Fields within a Point-Based Implicit Neural Map,” in Proc. of Robotics: Science and Systems (RSS), 2025. 📄 Paper: https://www.roboticsproceedings.org/rss21/p040.pdf 🔗 Code: https://github.com/PRBonn/PINGS

Trailer: Kinematic-ICP: Enhancing LiDAR Odometry with Kinematic Constraints for Wheeled …(ICRA’25)
Paper: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/guadagnino2025icra.pdf Code: https://github.com/PRBonn/kinematic-icp T. Guadagnino, B. Mersch, I. Vizzo, S. Gupta, M.V.R. Malladi, L. Lobefaro, G. Doisy, and C. Stachniss. Kinematic‑ICP: Enhancing LiDAR Odometry with Kinematic Constraints for Wheeled Mobile Robots Moving on Planar Surfaces. In Proc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA), 2025.

Uni Bonn Celebrates – 8 out of 8 Clusters Secured! | Uni Bonn
Yesterday, researchers and staff at the University of Bonn gathered to witness a momentous announcement: All eight of the university’s submitted research clusters have been approved for funding under the Excellence Strategy of the German federal and state governments. This achievement solidifies Bonn’s position at the forefront of German research institutions. In this video, we showcase the reactions of the university community—genuine emotions, surprise, and pride. The Eight Clusters of Excellence at the University of Bonn (Funding Period 2026–2032): Bonn Center for Dependency and Slavery Studies (BCDSS) ECONtribute: Markets & Public Policy Hausdorff Center for Mathematics (HCM) ImmunoSensation³ Matter and Light for Quantum Computing (ML4Q) Our Dynamic Universe PhenoRob Color meets Flavor More Information: https://www.uni-bonn.de/de/neues/095-2025 ➡ Noch mehr von der #unibonn: Instagram: https://www.instagram.com/universitaetbonn/ LinkedIn: https://www.linkedin.com/school/rheinische-friedrich-wilhelms-universit%C3%A4t-bonn Bluesky: https://bsky.app/profile/unibonn.bsky.social Facebook: https://www.facebook.com/unibonn Webseite: https://www.uni-bonn.de

PhenoRob: Research Priorities to Leverage Smart Digital Technologies for Sustainable Crop Production
Agriculture today faces significant challenges that require new ways of thinking, such as smart digital technologies that enable innovative approaches. However, research gaps limit their potential to improve agriculture. In our PhenoRob paper “Research Priorities to Leverage Smart Digital Technologies for Sustainable Crop Production”, Sabine Seidel, Hugo Storm and Lasse Klingbeil outline an interdisciplinary agenda to address the key research gaps and advance sustainability in agriculture. They identify four critical areas: 1. Monitoring to detect weeds and the status of surrounding crops 2. Modelling to predict the yield impact and ecological impacts 3. Decision making by weighing the yield loss against the ecological impact 4. Model uptake, for example policy support to compensate farmers for ecological benefits Closing these gaps requires strong interdisciplinary collaboration. In PhenoRob, this is achieved through five core experiments, seminar and lecture series, and interdisciplinary undergraduate and graduate teaching activities. The paper is available at: H. Storm, S. J. Seidel, L. Klingbeil, F. Ewert, H. Vereecken, W. Amelung, S. Behnke, M. Bennewitz, J. Börner, T. Döring, J. Gall, A. -K. Mahlein, C. McCool, U. Rascher, S. Wrobel, A. Schnepf, C. Stachniss, and H. Kuhlmann, “Research Priorities to Leverage Smart Digital Technologies for Sustainable Crop Production,” European Journal of Agronomy, vol. 156, p. 127178, 2024. doi:10.1016/j.eja.2024.127178 https://www.sciencedirect.com/science/article/pii/S1161030124000996?via%3Dihub

DynamoBot – a PhenoRob Startup
At the PhenoRob and University of Bonn Start-Up DynamoBot, we are building the next generation of precision farming and precision weed management for farmers. At the core of DynamoBot, we have a technology that is heavily based on robotics, artificial intelligence, and advanced computer vision systems. The design of our product encourages three different plant-level intervention types, all at the same time: mechanical, chemical, and electrical, which are all embedded in a multi-head and multi-axis system. This enables intervening with different plants with different characteristics, all at the same time, without the need for farmers to change the tools or change any other parameters in the system. Farmers could easily attach the tool behind any traktor or deploy it with an autonomous robotics system. The DynamoBot technology opens up new possibilities for targeted and biodiversity-aware weed management in both organic and conventional farming systems.

UAV-based Spot Spraying Against Plant Diseases (PhenoRob Demonstrator)
Plant diseases often exhibit a patchy distribution within fields. The application of fungicides, however, is often based on environmental conditions and visual assessment and then, in practice, is homogeneous over entire fields. A site-specific control of plant diseases with robotics and drone technology from PhenoRob provides the potential to improve the efficacy of disease control while reducing the negative impact on agricultural ecosystems.

Digital Agricultural Avatar (PhenoRob Demonstrator)
The PhenoRob Digital Agricultural Avatar is a software that facilitates access and usability of process-based simulation agro-models under one roof. Our aim is to provide information and a usage platform to make process-based agro-models available in an appealing way both for users as well as for the public.

Bee Demonstrator – Detect and Identify Pollinators in the Field (PhenoRob Demonstrator)
Field margins, floral plantings, and crops offering nectar and pollen to insects may contribute to ecosystem service delivery (pollination) and ecological intensification of agriculture. The application of machine learning on data collected using low-cost RGB cameras represents a new opportunity to investigate, evaluate, and optimize the attractiveness of such cropping systems to beneficial insects. In this demonstrator, we applied innovative technology to detect and identify pollinators in the field and automatize the detection and quantification of pollinators in addition to classical measurements. Furthermore, we developed and tested a new maize-based cropping system that includes phacelia or a commercial flowering strip mixture in a maize field (intercropping) to allow for a large area of connected fodder supply to pollinators while aiming for minimized maize yield losses due to competition. The video shows the field experiment and the observations in the year 2023. First results show that the maize-based intercropping system significantly increased insect abundance compared to sole maize and could potentially connect isolated areas while providing maize yield. Our machine learning approach to non-invasively and automatically detect and count pollinators in RGB images has a high potential to evaluate cropping systems (e.g., flower strip seeds) or management impacts (e.g., weeding) on insect abundance.

Automated Leaf-Level Inspection of Crops by Combining UAV and UGVs (PhenoRob Demonstrator)
Robotic systems play a major role for realizing the vision of sustainable crop production. While Unmanned Aerial Vehicles (UAVs) are increasingly used to monitor the health status of agricultural fields using sensors like RGB cameras, multi-spectral cameras, and LiDAR, it is often still necessary to literally walk into the field to do close-up inspections of individual plants or even leaves for the detection of diseases or nutrient deficiencies in early stages of plant growth. The main contribution of this work is demonstrating the integration of aerial and ground robotic systems to automate plant inspection processes, thereby enhancing efficiency in field monitoring tasks. A UAV identifies areas or plants of interest from higher altitudes whose coordinates are transferred to an Unmanned Ground Vehicle (UGV). The UGV then autonomously navigates to the specified location and a mounted robotic arm with five cameras captures close-range images with automatically optimized camera poses. The result is a high-resolution 3D reconstruction suitable for further plant analysis. This integration of UAV and UGV allows us to ‘zoom in’ on any coordinate in the field with a few centimeters of accuracy.

Technology Adoption and Impact (PhenoRob CP6)
Core Project 6 analyzes the potential impact of robotics and phenotyping technologies on agricultural development, welfare, the environment, the landscape, as well as on the farm level. Therefore, we are developing a simulation model for PhenoRob technology diffusion and impact. We are also assessing regional feasibility and the ecological-economic impact in Germany and the rest of the world by analyzing economic barriers and opportunities for the market launch of the inventions. The DFG-funded Cluster of Excellence PhenoRob – Robotics and Phenotyping for Sustainable Crop Production is divided into 6 Core Projects, each with its own focus.

New Field Arrangements (PhenoRob CP5)
Crop mixtures offer multiple advantages over mono-cropping. Core Project 5 makes use of newly developed advanced data acquisition and data analysis tools to provide new insights into interactions and mechanisms in crop mixtures. This leads to a set of clearly identified, compatible crop partners. The new tools also allow for plants to be optimally allocated in field patches and for novel technologies to maintain such field patches. This results in ideal field sizes, shapes, and settings with regard to the ecosystem, biodiversity, resource use, and resource efficiency. The DFG-funded Cluster of Excellence PhenoRob – Robotics and Phenotyping for Sustainable Crop Production is divided into 6 Core Projects, each with its own focus.

Autonomous In-Field Intervention (PhenoRob CP4)
Core Project 4 aims at converting the collected data into robotic actions in the fields, exploiting digital avatars. Precise robotic weeding, for example, seeks to intervene in a minimally invasive way, reducing the amount of inputs such as herbicides. This project develops autonomous field aerial and ground robots that detect and identify individual plants, weed mapping the field to treat individual plants with the most appropriate intervention. The robots precisely apply nitrogen fertilizer enabled by digital avatars that predict the plant nutrient demand and probable losses in the field. The DFG-funded Cluster of Excellence PhenoRob – Robotics and Phenotyping for Sustainable Crop Production is divided into 6 Core Projects, each with its own focus.

The Soil-Root Zone (PhenoRob CP3)
Core Project 3 measures the soil-root zones of crops with minimally or non-invasive sensors and robotic technology concentrating on sensing and predicting root performance in the field. New technologies such as 3D imaging methods gather information on the spatial organization of subsurface soil at the field scale. We aim to assemble the tools to collect and apply soil-root zone data to structural function crop models, yield predictions with the goal of optimizing resource inputs on farms in real time. The DFG-funded Cluster of Excellence PhenoRob – Robotics and Phenotyping for Sustainable Crop Production is divided into 6 Core Projects, each with its own focus.

Relevance Detection of Crop Features (PhenoRob CP2)
Based on aboveground data collected in the field that displays crop development, Core Project 2 identifies unknown correlations towards realizing new expressive features for crop science. Here, the focus is on the link between different growth phases and stress influences such as plant disease, nutrient deficiencies, or drought stress on yield development. We identify key features using machine learning techniques that are validated through experimental design approaches. This leads to new insights into the interpretation of sensor data, as well as support for decision-making in practical agriculture or plant breeding. The DFG-funded Cluster of Excellence PhenoRob – Robotics and Phenotyping for Sustainable Crop Production is divided into 6 Core Projects, each with its own focus.

In-Field 4D Crop Reconstruction (PhenoRob CP1)
To make good decisions, it is vital to know the current condition of the field. Core Project 1 develops novel ground and aerial vehicles that operate autonomously and provide precisely georeferenced, phenotypic data from single plant organs over the experimental plot to the field scale. We register 3D structural models of the same plant over time, leading to a 4D reconstruction. Our aim is to develop a new generation of mapping systems as well as a better understanding of the spatio-temporal dynamics of structural and functional plant traits. The goal is to reconstruct several hundred individual plants per day in an experimental field design. The DFG-funded Cluster of Excellence PhenoRob – Robotics and Phenotyping for Sustainable Crop Production is divided into 6 Core Projects, each with its own focus.
Trailer: Scaling Diffusion Models to Real-World 3D LiDAR Scene Completion (CVPR’24)
Trailer for the paper: L. Nunes, R. Marcuzzi, B. Mersch, J. Behley, and C. Stachniss, “Scaling Diffusion Models to Real-World 3D LiDAR Scene Completion,” in Proc. of the IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2024.
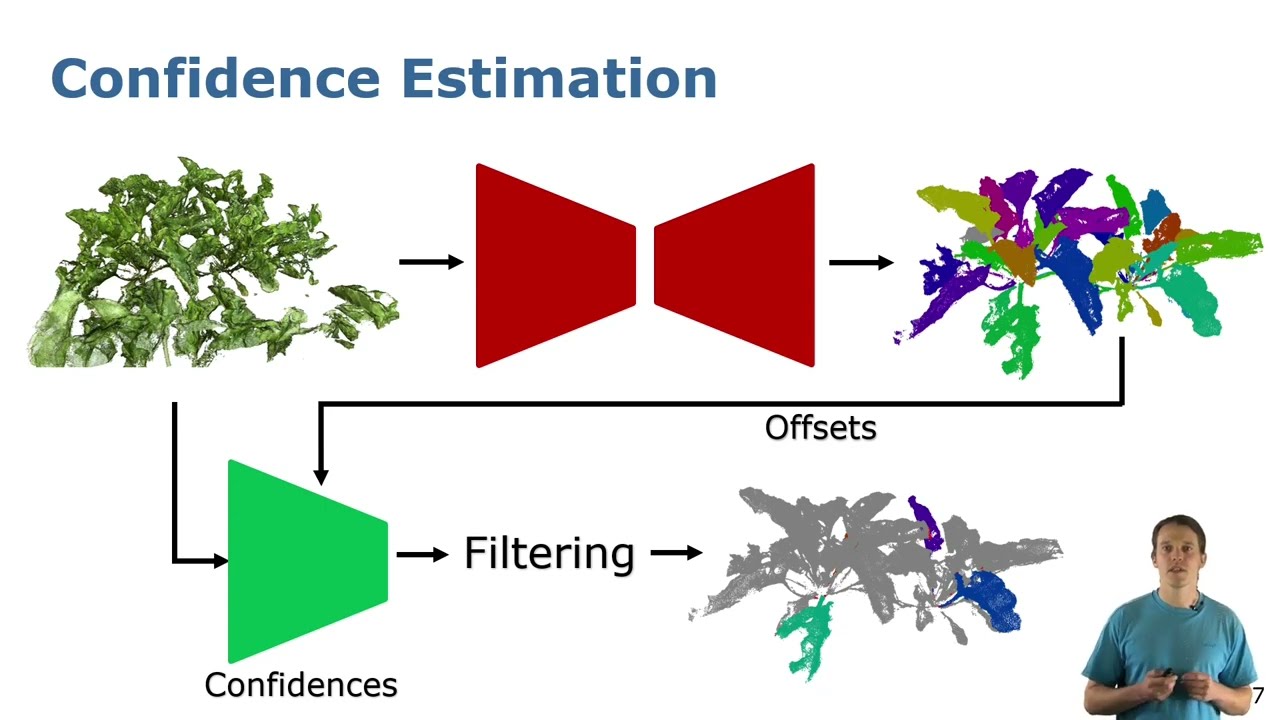
Trailer: High Precision Leaf Instance Segmentation in Point Clouds Obtained Under Real Field…
Trailer for the paper: E. Marks, M. Sodano, F. Magistri, L. Wiesmann, D. Desai, R. Marcuzzi, J. Behley, and C. Stachniss, “High Precision Leaf Instance Segmentation in Point Clouds Obtained Under Real Field Conditions,” IEEE Robotics and Automation Letters (RA-L), vol. 8, iss. 8, pp. 4791-4798, 2023. doi:10.1109/LRA.2023.3288383 PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/marks2023ral.pdf CODE: https://github.com/PRBonn/plant_pcd_segmenter VIDEO: https://youtu.be/dvA1SvQ4iEY TALK: https://youtu.be/_k3vpYl-UW0

Trailer: Unsupervised Pre-Training for 3D Leaf Instance Segmentation (RAL’2023)
Paper trailer about the work: G. Roggiolani, F. Magistri, T. Guadagnino, J. Behley, and C. Stachniss, “Unsupervised Pre-Training for 3D Leaf Instance Segmentation,” IEEE Robotics and Automation Letters (RA-L), vol. 8, pp. 7448-7455, 2023. doi:10.1109/LRA.2023.3320018 PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/roggiolani2023ral.pdf CODE: https://github.com/PRBonn/Unsupervised-Pre-Training-for-3D-Leaf-Instance-Segmentation

Trailer: Effectively Detecting Loop Closures using Point Cloud Density Maps
Paper trailer for the work: S. Gupta, T. Guadagnino, B. Mersch, I. Vizzo, and C. Stachniss, “Effectively Detecting Loop Closures using Point Cloud Density Maps,” in Proc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA), 2024. PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/gupta2024icra.pdf CODE: https://github.com/PRBonn/MapClosures

Trailer: LocNDF: Neural Distance Field Mapping for Robot Localization (RAL’24)
Paper trailer for the work: L. Wiesmann, T. Guadagnino, I. Vizzo, N. Zimmerman, Y. Pan, H. Kuang, J. Behley, and C. Stachniss, “LocNDF: Neural Distance Field Mapping for Robot Localization,” IEEE Robotics and Automation Letters (RA-L), vol. 8, iss. 8, p. 4999–5006, 2023. doi:10.1109/LRA.2023.3291274 PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/wiesmann2023ral-icra.pdf CODE: https://github.com/PRBonn/LocNDF

Trailer: Tree Instance Segmentation and Traits Estimation for Forestry Environments… (ICRA’24)
Paper Trailer for the work: M. V. R. Malladi, T. Guadagnino, L. Lobefaro, M. Mattamala, H. Griess, J. Schweier, N. Chebrolu, M. Fallon, J. Behley, and C. Stachniss, “Tree Instance Segmentation and Traits Estimation for Forestry Environments Exploiting LiDAR Data ,” in Proc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA), 2024. PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/malladi2024icra.pdf
Trailer: Unsupervised Generation of Labeled Training Images for Crop-Weed Segmentation in New …
Paper trailer for the paper: Y. L. Chong, J. Weyler, P. Lottes, J. Behley, and C. Stachniss, “Unsupervised Generation of Labeled Training Images for Crop-Weed Segmentation in New Fields and on Different Robotic Platforms,” IEEE Robotics and Automation Letters (RA-L), vol. 8, iss. 8, p. 5259–5266, 2023. doi:10.1109/LRA.2023.3293356 PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/chong2023ral.pdf CODE: https://github.com/PRBonn/StyleGenForLabels
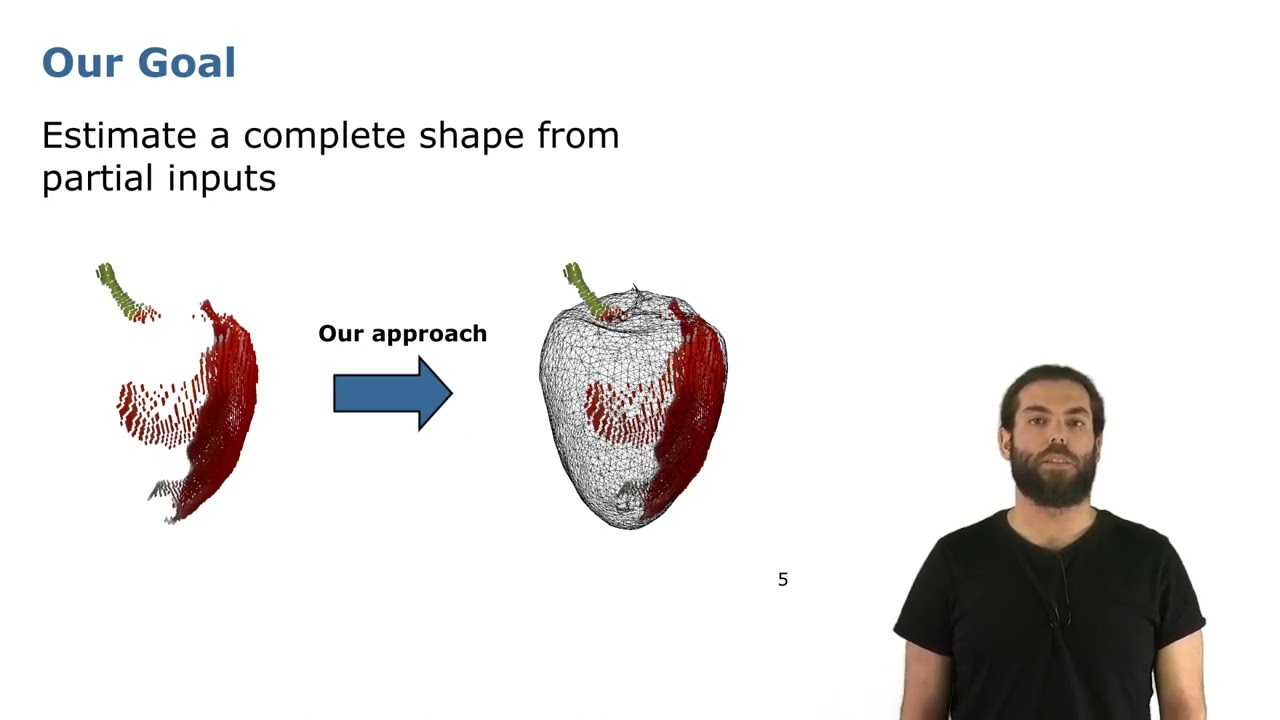
Trailer: Efficient and Accurate Transformer-Based 3D Shape Completion and Reconstruction of Fruits..
Paper Trailer for: F. Magistri, R. Marcuzzi, E. A. Marks, M. Sodano, J. Behley, and C. Stachniss, “Efficient and Accurate Transformer-Based 3D Shape Completion and Reconstruction of Fruits for Agricultural Robots,” in Proc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA), 2024. PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/magistri2024icra.pdf Code (to be released soon): https://github.com/PRBonn/TCoRe

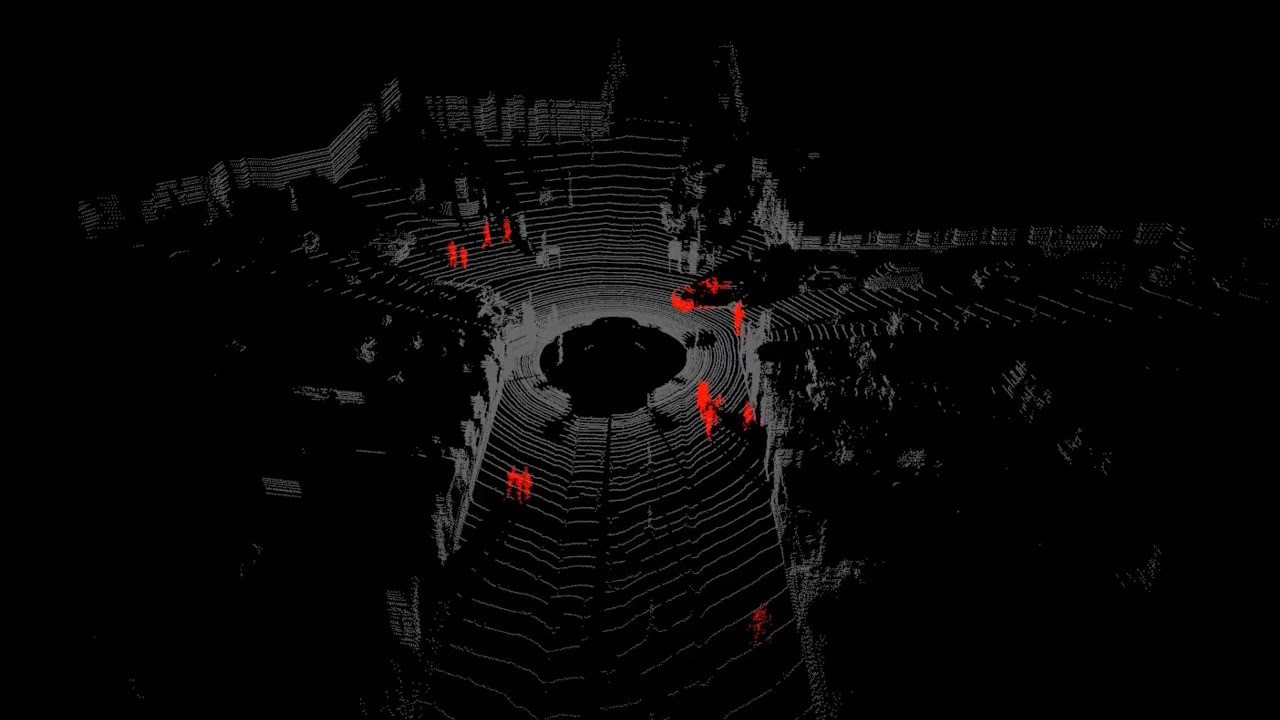
Trailer: Mask4D: End-to-End Mask-Based 4D Panoptic Segmentation for LiDAR Sequences (RAL’23/ICRA’24)
Paper Tailer for: R. Marcuzzi, L. Nunes, L. Wiesmann, E. Marks, J. Behley, and C. Stachniss, “Mask4D: End-to-End Mask-Based 4D Panoptic Segmentation for LiDAR Sequences,” IEEE Robotics and Automation Letters (RA-L), vol. 8, iss. 11, pp. 7487-7494, 2023. doi:10.1109/LRA.2023.3320020 PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/marcuzzi2023ral-meem.pdf CODE: https://github.com/PRBonn/Mask4D

Trailer: Mask-Based Panoptic LiDAR Segmentation for Autonomous Driving (RAL’23/IROS’23)
Paper Trailer for the work: R. Marcuzzi, L. Nunes, L. Wiesmann, J. Behley, and C. Stachniss, “Mask-Based Panoptic LiDAR Segmentation for Autonomous Driving,” IEEE Robotics and Automation Letters (RA-L), vol. 8, iss. 2, p. 1141–1148, 2023. doi:10.1109/LRA.2023.3236568 PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/marcuzzi2023ral.pdf
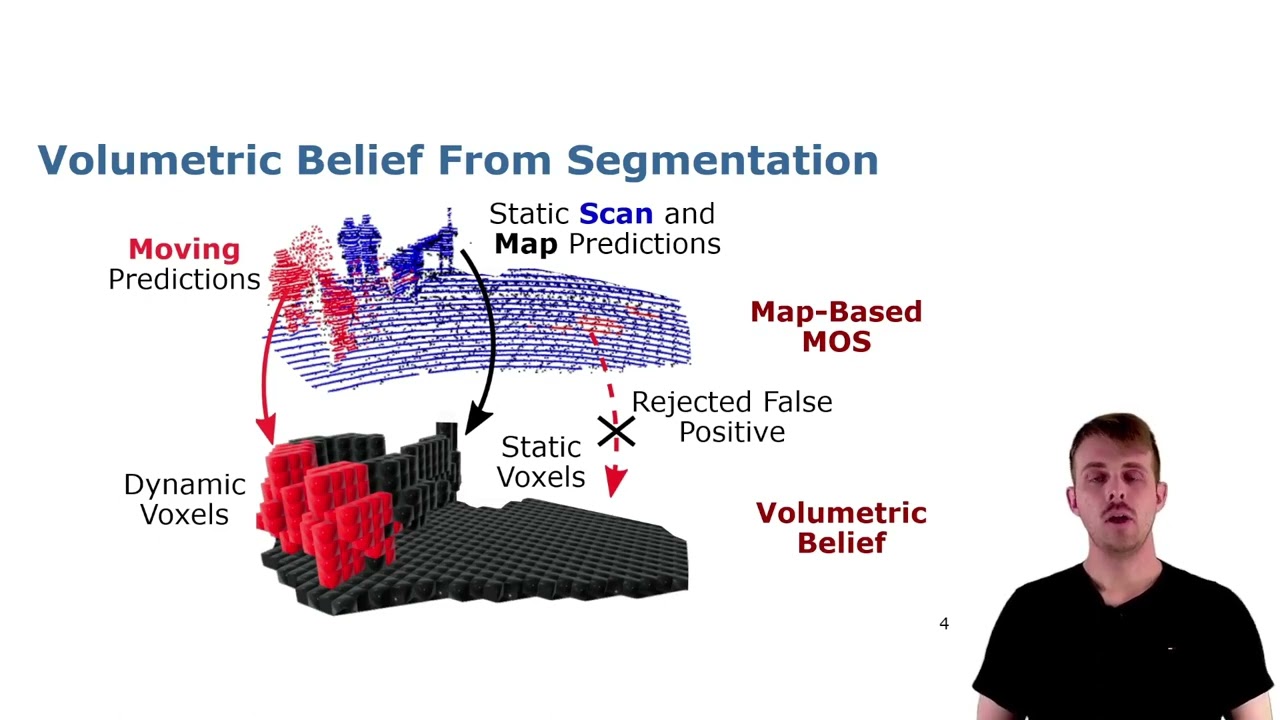
Trailer: Building Volumetric Beliefs for Dynamic Environments Exploiting Map-Based MOS (RAL’23)
Short Trailer Video for the RAL Paper to be presented at ICRA’2024: B. Mersch, T. Guadagnino, X. Chen, I. Vizzo, J. Behley, and C. Stachniss, “Building Volumetric Beliefs for Dynamic Environments Exploiting Map-Based Moving Object Segmentation,” IEEE Robotics and Automation Letters (RA-L), vol. 8, iss. 8, p. 5180–5187, 2023. doi:10.1109/LRA.2023.3292583 PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/mersch2023ral.pdf:
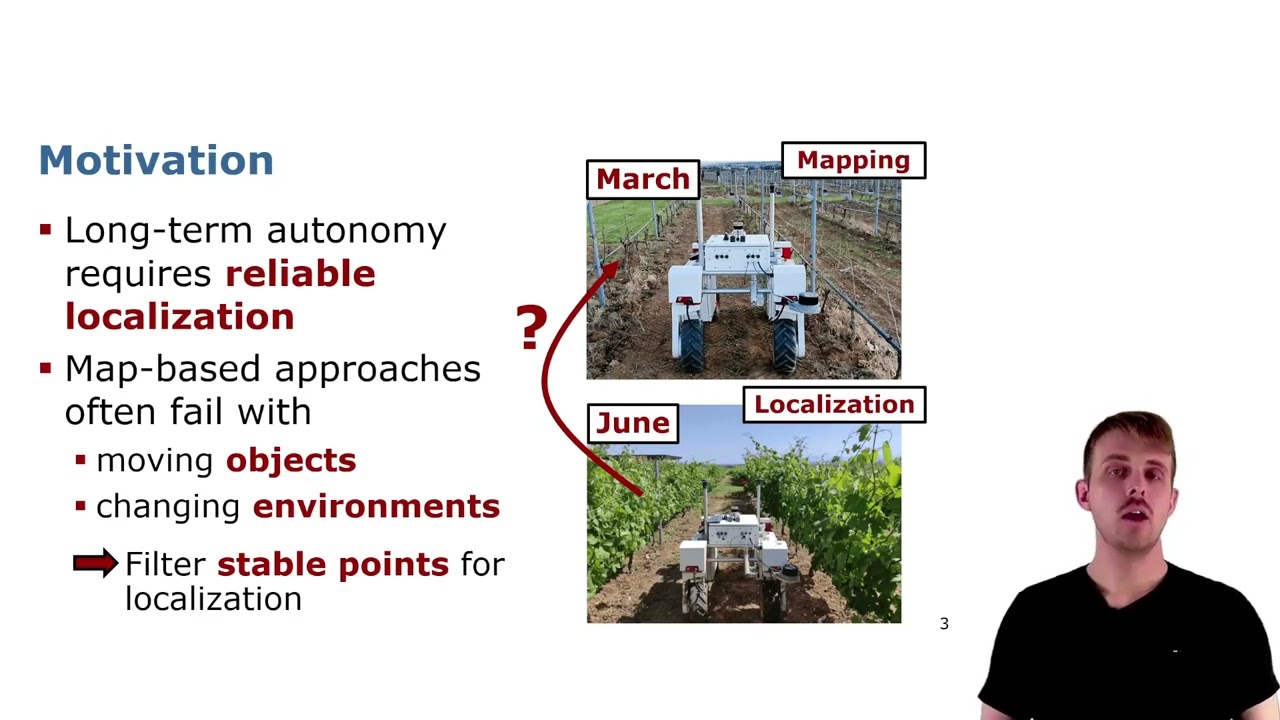
Trailer: Generalizable Stable Points Segmentation for 3D LiDAR Long-Term Localization (RAL’24)
Short Trailer Video for the RAL Paper to be presented at ICRA’2024: I. Hroob, B. Mersch, C. Stachniss, and M. Hanheide, “Generalizable Stable Points Segmentation for 3D LiDAR Scan-to-Map Long-Term Localization,” IEEE Robotics and Automation Letters (RA-L), vol. 9, iss. 4, pp. 3546-3553, 2024. doi:10.1109/LRA.2024.3368236 PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/hroob2024ral.pdf

Ministerpräsident Wüst besucht Humanoid Robots Lab der Universität Bonn
Der Ministerpräsident des Landes Nordrhein-Westfalen, Hendrik Wüst, hat am Donnerstagnachmittag das @HumanoidsBonn Lab der Universität Bonn besucht sowie @PhenoRob und @lamarrinstitute. Im Zentrum der Gespräche standen aktuelle Forschungsprojekte im Bereich der Robotik und die Herausforderungen, die mit dem Einsatz von Robotern in menschlichen Umgebungen verbunden sind. Dabei konnte sich der Ministerpräsident in eine Virtuelle Realität mit einem Roboter begeben und einem dreiarmigen Roboter bei der Paprikaernte zusehen. ℹ Weitere Informationen: uni-bonn.de/de/neues/041-2024 ➡ Noch mehr von der #unibonn: Instagram: https://www.instagram.com/universitaetbonn/ LinkedIn: https://www.linkedin.com/school/rheinische-friedrich-wilhelms-universit%C3%A4t-bonn X: https://twitter.com/UniBonn Facebook: https://www.facebook.com/unibonn Webseite: https://www.uni-bonn.de/de

PhenoRob Partner Project: AID4Crops
Automation and Artificial Intelligence for Monitoring and Decision Making in Horticultural Crops (AID4Crops) is a DFG Research Unit in the area of Artificial Intelligence (AI) which will kick of in early 2023. AID4Crops will bring together research about what can be sensed with what should be sensed. To do this, the researchers will develop novel AI algorithms to enable autonomous monitoring (sensing) and management (forecasting and decision making) for horticultural crops. These approaches will be deployed in horticulture as it provides a set of realistic yet challenging environments with crops grown both indoors (in glasshouses) and outdoor (in orchards); the indoor environment provides greater control over the growth of the crops.

DigiForest – Digital Analytics and Robotics for Sustainable Forestry
What if we could create a revolution in spatial data acquisition, organization and analysis and give forestry operators and enterprises up-to-date, tangible information about the status of their forests down to the individual tree? We believe this would improve their oversight by allowing more accurate growth modelling of forest stands and precise predictions of timber yields. It would remove the uncertainty of when thinning operations are needed or where there are trees which are ready for harvest. It could also enable operators to automatically plan where their staff or equipment should be deployed. With capable (semi-)autonomous harvesting, operators eventually automating the full process. It could also better quantify a forest’s carbon sequestration – with low uncertainty per-tree carbon estimates. Precise measures of crown volume and tree diameters would improve the granularity of carbon credit schemes. This could inform national governments and policy makers when deciding policy on initiatives such as carbon offsets and carbon farming. In DIGIFOREST, we propose to create such an ecosystem by developing a team of heterogeneous robots to collect and update this raw 3D spatial representations, building large scale forest maps and feeding them to machine learning and spatial AI to semantically segment and label the trees and also the terrain. Our robot team will be diverse: we will use both rugged field robots as well as more experimental vehicles. Most ambitious of all is the intention to (semi-)automate a lightweight harvester for sustainable selective logging. https://digiforest.eu/

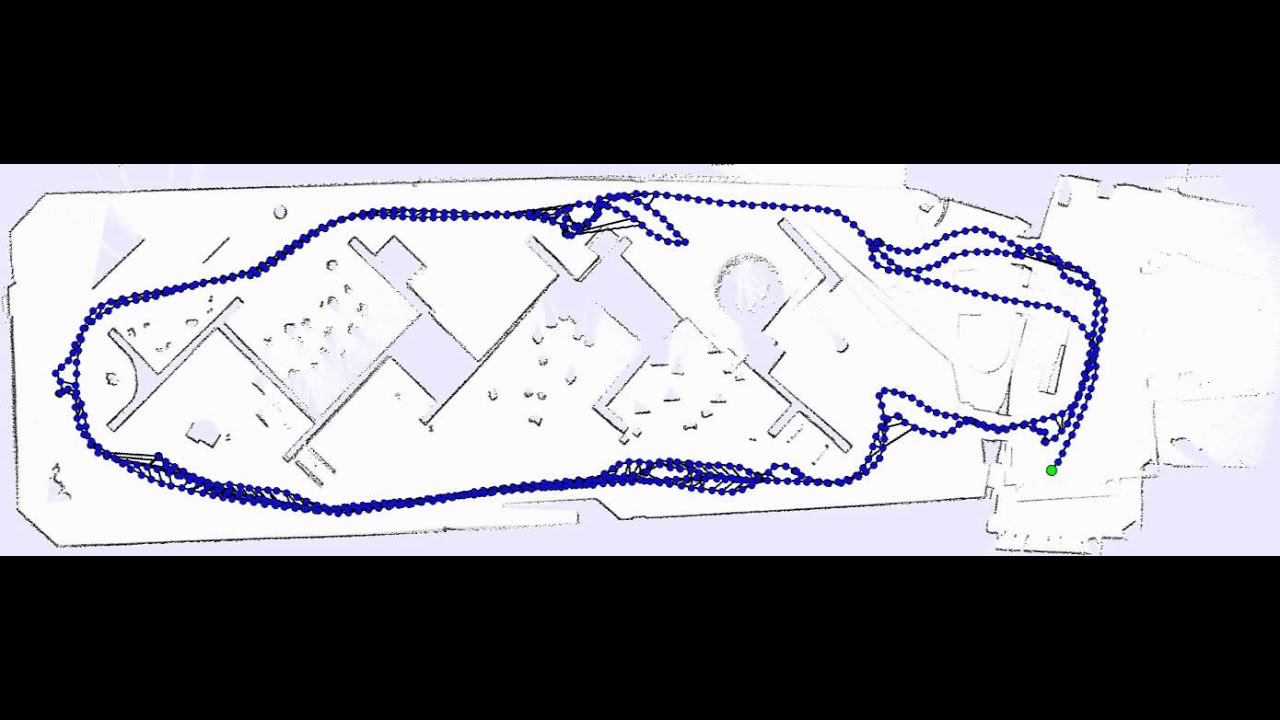
Running KISS-ICP on KITTI
RAL-IROS’22 Results: Receding Moving Object Segmentation in 3D LiDAR Data Using Sparse 4D Conv…
Receding Moving Object Segmentation in 3D LiDAR Data Using Sparse 4D Convolutions by Benedikt Mersch et al. 2022 Presentation: https://www.youtube.com/watch?v=5aWew6caPNQ Paper (RAL-IROS): https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/mersch2022ral.pdf Code: https://github.com/PRBonn/4DMOS

Faces of PhenoRob: Heiner Kuhlmann and Cyrill Stachniss
In Faces of PhenoRob, we introduce you to some of PhenoRob’s many members: from senior faculty to PhDs, this is your chance to meet them all and learn more about the work they do!

ICRA’22: Retriever: Point Cloud Retrieval in Compressed 3D Maps by Wiesmann et al.
L. Wiesmann, R. Marcuzzi, C. Stachniss, and J. Behley, “Retriever: Point Cloud Retrieval in Compressed 3D Maps,” in Proc.~of the IEEE Intl.~Conf.~on Robotics & Automation (ICRA), 2022. PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/wiesmann2022icra.pdf #UniBonn #StachnissLab #robotics
RAL-ICRA’22: Contrastive Instance Association for 4D Panoptic Segmentation… by Marcuzzi et al.
R. Marcuzzi, L. Nunes, L. Wiesmann, I. Vizzo, J. Behley, and C. Stachniss, “Contrastive Instance Association for 4D Panoptic Segmentation using Sequences of 3D LiDAR Scans,” IEEE Robotics and Automation Letters (RA-L), vol. 7, iss. 2, pp. 1550-1557, 2022. doi:10.1109/LRA.2022.3140439 PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/marcuzzi2022ral.pdf #UniBonn #StachnissLab #robotics
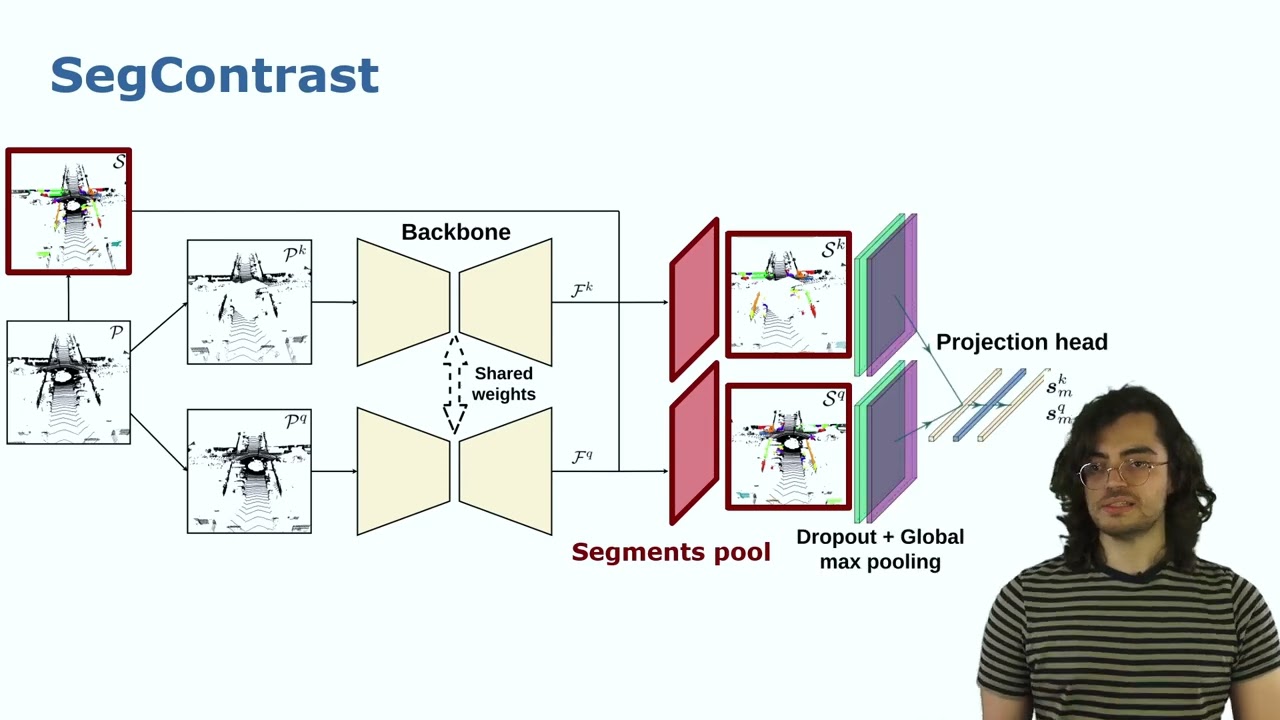
RAL-ICRA’22: SegContrast: 3D Point Cloud Feature Representation Learning … by Nunes et al.
L. Nunes, R. Marcuzzi, X. Chen, J. Behley, and C. Stachniss, “SegContrast: 3D Point Cloud Feature Representation Learning through Self-supervised Segment Discrimination,” IEEE Robotics and Automation Letters (RA-L), vol. 7, iss. 2, pp. 2116-2123, 2022. doi:10.1109/LRA.2022.3142440 PDF: http://www.ipb.uni-bonn.de/pdfs/nunes2022ral-icra.pdf CODE: https://github.com/PRBonn/segcontrast #UniBonn #StachnissLab #robotics
RAL-ICRA’22: Joint Plant and Leaf Instance Segmentation on Field-Scale UAV Imagery by Weyler et al.
J. Weyler, J. Quakernack, P. Lottes, J. Behley, and C. Stachniss, “Joint Plant and Leaf Instance Segmentation on Field-Scale UAV Imagery,” IEEE Robotics and Automation Letters (RA-L), vol. 7, iss. 2, pp. 3787-3794, 2022. doi:10.1109/LRA.2022.3147462 PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/weyler2022ral.pdf #UniBonn #StachnissLab #robotics
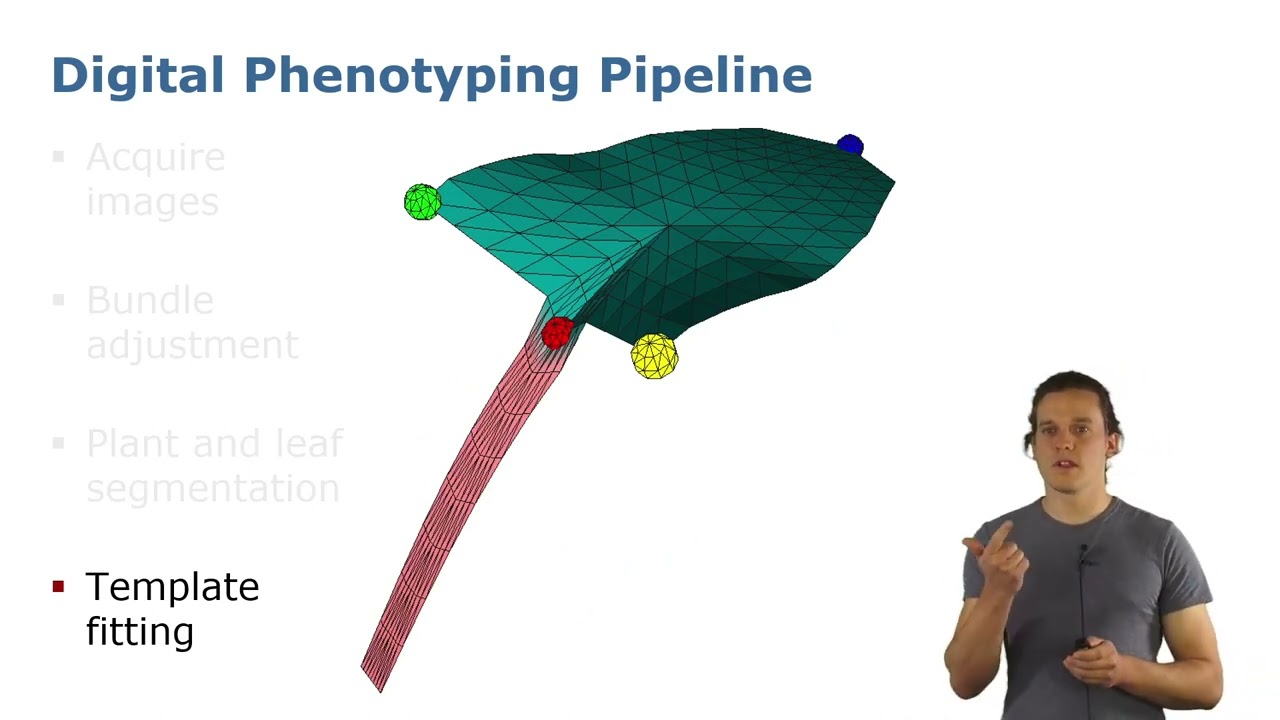
ICRA’22: Precise 3D Reconstruction of Plants from UAV Imagery … by Marks et al.
E. Marks, F. Magistri, and C. Stachniss, “Precise 3D Reconstruction of Plants from UAV Imagery Combining Bundle Adjustment and Template Matching,” in Proc.~of the IEEE Intl.~Conf.~on Robotics & Automation (ICRA), 2022. PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/marks2022icra.pdf #UniBonn #StachnissLab #robotics

DIGICROP 2022: Join us on March 28 to 30

WACV’22: In-Field Phenotyping Based on Crop Leaf and Plant Instance Segmentation by Weyler et al.
J. Weyler, F. and Magistri, P. Seitz, J. Behley, and C. Stachniss, “In-Field Phenotyping Based on Crop Leaf and Plant Instance Segmentation,” in Proc. of the Winter Conf. on Applications of Computer Vision (WACV), 2022. PDF: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/weyler2022wacv.pdf #UniBonn #StachnissLab #robotics

Digitalisierter Acker: Mit Drohnen und Robotern in die Zukunft der Landwirtschaft
Extremwetter wie Dürren und Überschwemmungen werden auch bei uns leider immer häufiger. Das hat auch schwerwiegende Auswirkungen auf die Landwirtschaft – und somit auch auf die Existenz von uns allen. Deshalb rückt diese eine Frage immer weiter in den Fokus: Wie kann man den Spagat zwischen Nachhaltigkeit und Effizienz in der Landwirtschaft schaffen. Im Rahmen unserer Forschungsreise haben wir das Exzellenzcluster PhenoRob in Bonn besucht. Die Wissenschaftlerinnen und Wissenschaftler dort suchen nach Antworten auf diese Frage. Und dabei kommen neben modernster Technik auch ganz spezielle Pflanzen zum Einsatz. #modernelandwirtschaft #möglichmacher #mkw

Lasse Klingbeil: Pheno4D: A spatio-temporal dataset of maize and tomato plant point clouds…
Dr. Lasse Klingbeil is Postdoc at the Institute of Geodesy and Geoinformation (IGG), University of Bonn and PhenoRob Member. Pheno4D: A spatio-temporal dataset of maize and tomato plant point clouds for phenotyping and advanced plant analysis D. Schunck, F. Magistri, R. A. Rosu, A. Cornelißen, N. Chebrolu, S. Paulus, J. Léon, S. Behnke, C. Stachniss, H. Kuhlmann, and L. Klingbeil PLOS ONE, vol. 16, iss. 8, pp. 1-18, 2021 Paper: https://doi.org/10.1371/journal.pone.0256340 Data: https://www.ipb.uni-bonn.de/data/pheno4d/

Pfeiffer-Poensgen: Hier sehe ich, was Unis zu bieten haben!
Auf Ihrer NRW-Forschungsreise hat Wissenschaftsministerin Isabel Pfeiffer-Poensgen die Universität Bonn besucht. Auf dem Campus Klein-Altendorf informierte sie sich unter anderem über die Forschung an Nutzpflanzen als Baustoffalternative. Außerdem besuchte sie den Exzellenzcluster PhenoRob, der an nachhaltiger Pflanzenproduktion forscht. Mit dem Exzellenzcluster Bonn Center for Dependency and Slavery Studies stand außerdem ein Cluster aus den Geisteswissenschaften im Mittelpunkt, der einen neuen Zugang zur Sklaverei- und Abhängigkeitsforschung eröffnet. (c) Universität Bonn / uni-bonn.tv Beitrag: Gunar Peters Kamera: Ole Lentfer & Gunar Peters

This is PhenoRob: Cluster of Excellence for Robotics & Phenotyping for Sustainable Crop Production
Achieving sustainable crop production with limited resources is a task of immense proportions. In order to achieve this, the University of Bonn together with Forschungszentrum Jülich conducts research in the Cluster of Excellence “PhenoRob – Robotics and Phenotyping for Sustainable Crop Production” to develop methods and new technologies that observe, analyze, better understand and specifically treat plants. Our research focuses on improving the fundamental understanding of all relevant parameters like plant growth, soil, biodiversity, or atmosphere. PhenoRob, the only Cluster of Excellence in agriculture in Germany, aims at addressing these issues: Change crop production by optimizing breeding and farming management using new technologies.

Bundesministerin Anja Karliczek zu Gast
Bundesministerin Karliczek informierte sich bei Gesprächen mit dem Rektorat, mit den sechs Bonner Exzellenzclustern und weiteren Akteuren über den Fortschritt der Uni Bonn bei der Umsetzung ihrer Exzellenzstrategie. #unibonntv war auf dem Campus Poppelsdorf dabei. Team: Gunar Peters (Kamera, Schnitt), Klaus Herkenrath #excellenzcluster #karliczek #UniBonn #UniversitaetBonn #UniversitätBonn

RAL-IROS’21: Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach by Chen et al.
Xieyuanli Chen, Shijie Li, Benedikt Mersch, Louis Wiesmann, Juergen Gall, Jens Behley, and Cyrill Stachniss: “Moving Object Segmentation in 3D LiDAR Data: A Learning-based Approach Exploiting Sequential Data”, RAL 2021 #UniBonn #StachnissLab #robotics #neuralnetworks #talk

RSS’21: Inferring Objectives in Continuous Dynamic Games from Noise-Corrupted … by Peters et al.
Short Talk (4 min) about the work: L. Peters, D. Fridovich-Keil, V. Rubies-Royo, C. J. Tomlin, and C. Stachniss, “Inferring Objectives in Continuous Dynamic Games from Noise-Corrupted Partial State Observations,” in Proceedings of Robotics: Science and Systems (RSS), 2021. Code: https://github.com/PRBonn/PartiallyObservedInverseGames.jl Paper: https://arxiv.org/pdf/2106.03611 #UniBonn #StachnissLab #robotics #talk
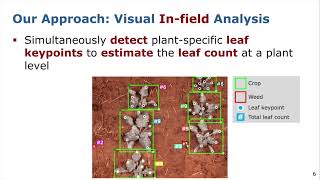
RAL-ICRA’21: Joint Plant Instance Detection and Leaf Count Estimation for Phenotyping by Weyler …
J. Weyler, A. Milioto, T. Falck, J. Behley, and C. Stachniss, “Joint Plant Instance Detection and Leaf Count Estimation for In-Field Plant Phenotyping,” IEEE Robotics and Automation Letters (RA-L), vol. 6, pp. 3599-3606, 2021. doi:10.1109/LRA.2021.3060712 #UniBonn #StachnissLab #robotics #PhenoRob #neuralnetworks #talk

ICRA’21: Phenotyping Exploiting Differentiable Rendering with Consistency Loss by Magistri et al.
F. Magistri, N. Chebrolu, J. Behley, and C. Stachniss, “Towards In-Field Phenotyping Exploiting Differentiable Rendering with Self-Consistency Loss,” in Proceedings of the IEEE Int. Conf. on Robotics & Automation (ICRA), 2021. Paper: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/magistri2021icra.pdf #UniBonn #StachnissLab #robotics #PhenoRob #neuralnetworks #talk

ICRA’21: Range Image-based LiDAR Localization for Autonomous Vehicles by Chen et al.
X. Chen, I. Vizzo, T. Läbe, J. Behley, and C. Stachniss, “Range Image-based LiDAR Localization for Autonomous Vehicles,” in Proceedings of the IEEE Int. Conf. on Robotics & Automation (ICRA), 2021. https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/chen2021icra.pdf #UniBonn #StachnissLab #robotics #autonomouscars #talk

IROS’20: Segmentation-Based 4D Registration of Plants Point Clouds for Phenotyping by Magistri et al
F. Magistri, N. Chebrolu, and C. Stachniss, “Segmentation-Based 4D Registration of Plants Point Clouds ,” in Proceedings of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2020. Paper: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/magistri2020iros.pdf #UniBonn #StachnissLab #robotics #PhenoRob #talk
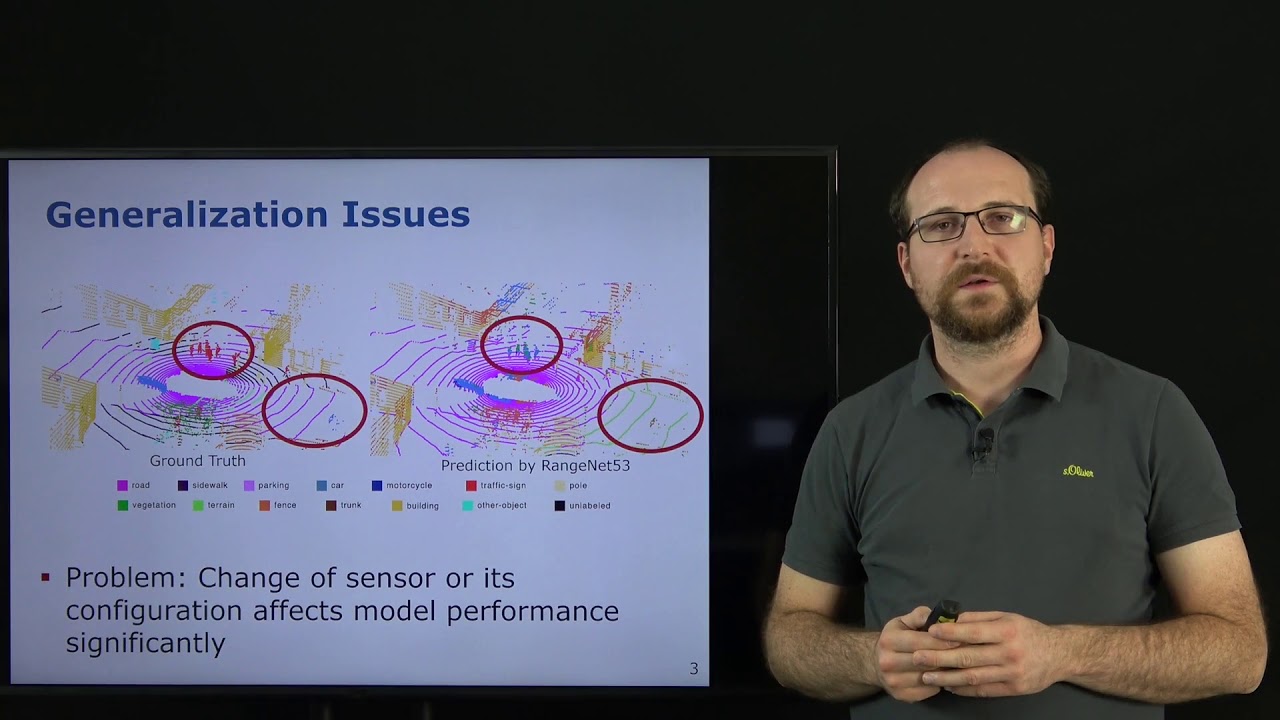
IROS’20: Domain Transfer for Semantic Segmentation of LiDAR Data using DNNs presented by J. Behley
F. Langer, A. Milioto, A. Haag, J. Behley, and C. Stachniss, “Domain Transfer for Semantic Segmentation of LiDAR Data using Deep Neural Networks,” in Proceedings of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2020. Paper: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/langer2020iros.pdf
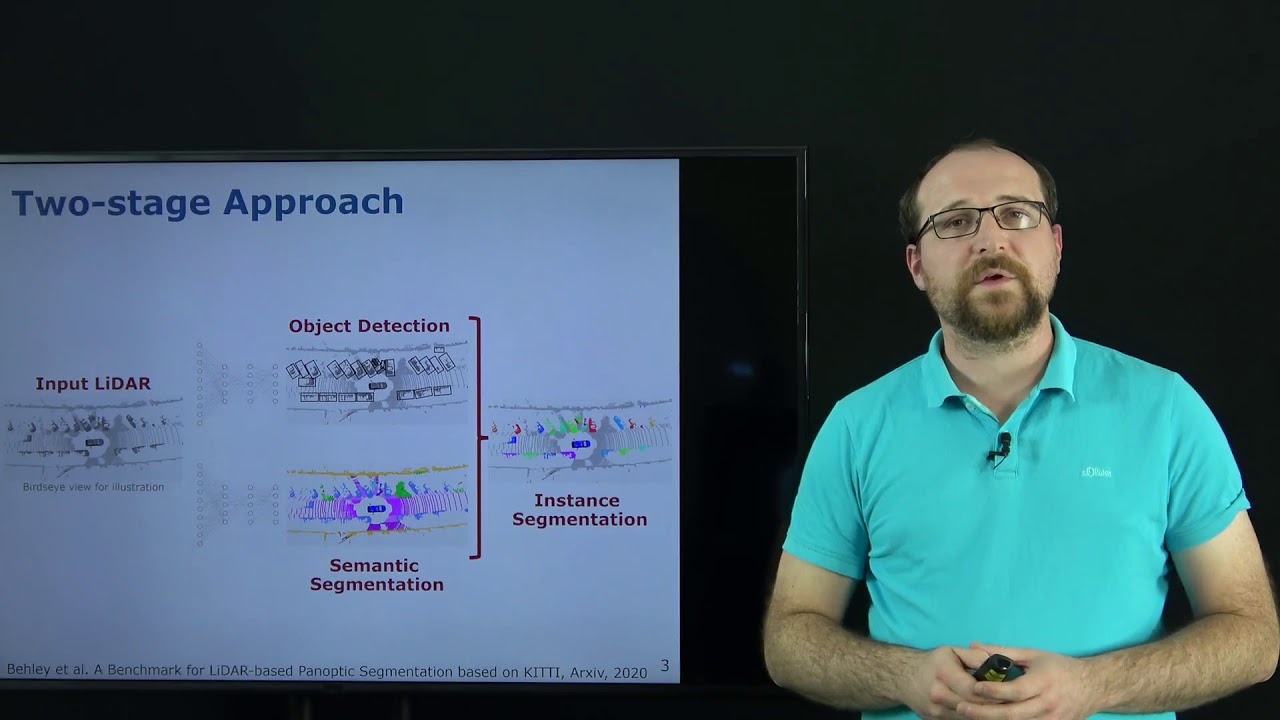
IROS’20: LiDAR Panoptic Segmentation for Autonomous Driving presented by J. Behley
Trailer video for the paper: A. Milioto, J. Behley, C. McCool, and C. Stachniss, “LiDAR Panoptic Segmentation for Autonomous Driving,” in Proceedings of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2020. Paper: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/milioto2020iros.pdf
IROS’20: Learning an Overlap-based Observation Model for 3D LiDAR Localization by Chen et al.
Trailer Video for the work: X. Chen, T. Läbe, L. Nardi, J. Behley, and C. Stachniss, “Learning an Overlap-based Observation Model for 3D LiDAR Localization,” in Proceedings of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2020. Paper: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/chen2020iros.pdf Code available!

Join our conference DIGICROP 2020 for free!
Visit: https://www.digicrop.de Join us for our free, online conference on Digital Technologies for Sustainable Crop Production run by the Cluster of Excellence PhenoRob.

DIGICROP’20: Spatio-Temporal Registration of Plant Point Clouds by Chebrolu et al.
D. Gogoll – Unsupervised Domain Adaptation for Transferring Plant Classification Systems (Trailer)
Watch the full presentation: http://digicrop.de/program/unsupervised-domain-adaptation-for-transferring-plant-classification-systems-to-new-field-environments-crops-and-robots/

RSS’20: OverlapNet – Loop Closing for LiDAR-based SLAM by Chen et al.
X. Chen, T. Läbe, A. Milioto, T. Röhling, O. Vysotska, A. Haag, J. Behley, and C. Stachniss, “OverlapNet: Loop Closing for LiDAR-based SLAM,” in Proceedings of Robotics: Science and Systems (RSS), 2020. Paper: https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/chen2020rss.pdf Code: https://github.com/PRBonn/OverlapNet (to be released before RSS) Vide: https://youtu.be/YTfliBco6aw

ICRA’20: Visual Servoing-based Navigation for Monitoring Crop Row Fields by Ahmadi et al.
Visual Servoing-based Navigation for Monitoring Crop Row Fields by Ahmadi et al., ICRA 2020
Cluster of Excellence PhenoRob: Robotics and Phenotyping for Sustainable Crop Production
Crop farming plays an essential role for the future of humanity and our planet. The environmental foodprint of agriculture needs to be reduced. To achieve this PhenoRobs research approach focuses on improving the fundamental understanding of plant growth, the soil root system and the environment. Learn how in this short explanation video.
RAL-ICRA’19: Effective Visual Place Recognition Using Multi-Sequence Maps by Vysotska & Stachniss
O. Vysotska and C. Stachniss, “Effective Visual Place Recognition Using Multi-Sequence Maps,” IEEE Robotics and Automation Letters (RA-L) and presentation at ICRA, 2019. PDF: http://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/vysotska2019ral.pdf
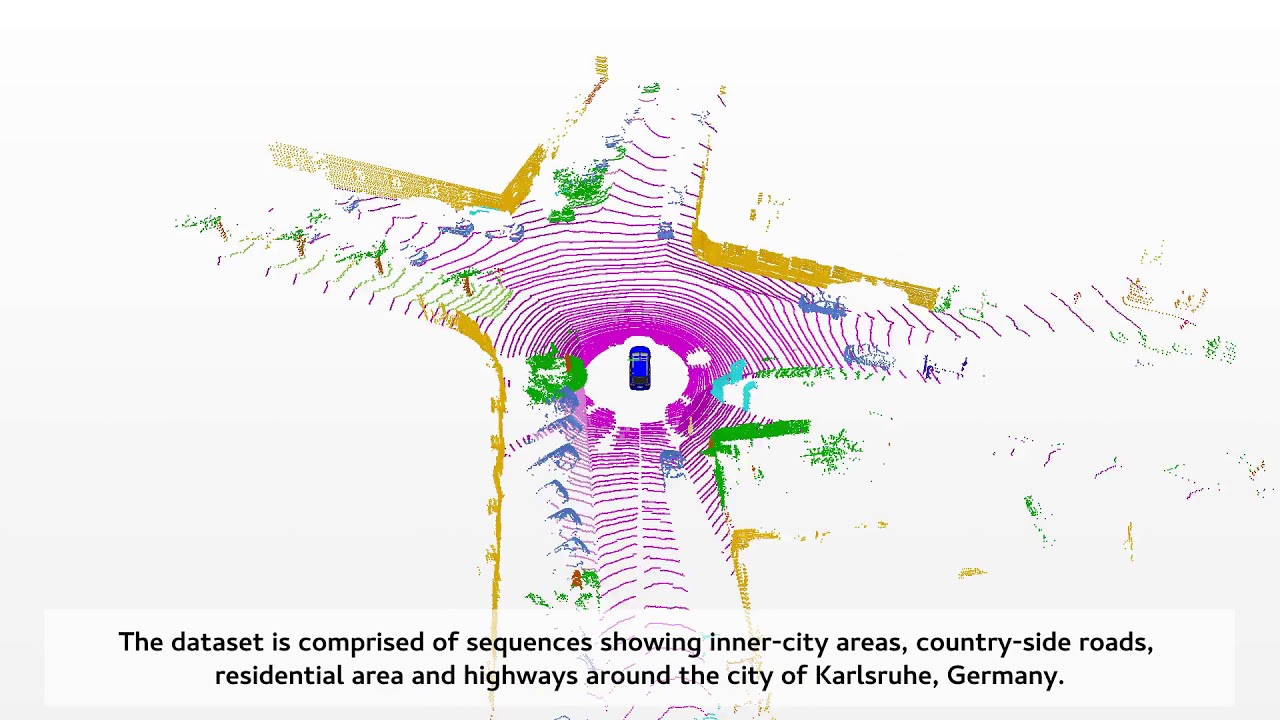
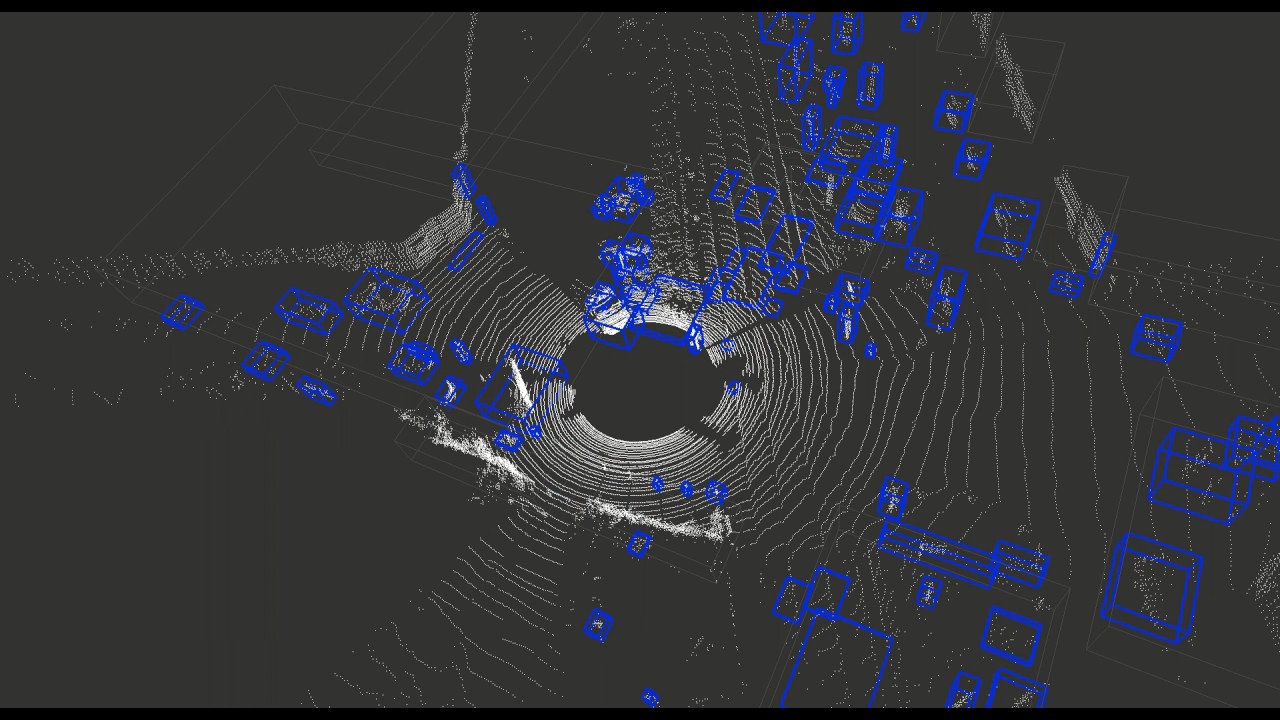
ICCV’19: SemanticKITTI: A Dataset for Semantic Scene Understanding of LiDAR Sequences, Behley et al.
With SemanticKITTI, we release a large dataset to propel research on laser-based semantic segmentation. We annotated all sequences of the KITTI Vision Odometry Benchmark and provide dense point-wise annotations for the complete 360 deg field-of-view of the employed automotive LiDAR. We propose three benchmark tasks based on this dataset: (i) semantic segmentation of point clouds using a single scan, (ii) semantic segmentation using sequences comprised of multiple past scans, and (iii) semantic scene completion, which requires to anticipate the semantic scene in the future. We provide baseline experiments and show that there is a need for more sophisticated models to efficiently tackle these tasks. See: http://semantic-kitti.org J. Behley, M. Garbade, A. Milioto, J. Quenzel, S. Behnke, C. Stachniss, and J. Gall, “SemanticKITTI: A Dataset for Semantic Scene Understanding of LiDAR Sequences,” in Proc. of the IEEE/CVF International Conf.~on Computer Vision (ICCV), 2019. PDF: https://arxiv.org/pdf/1904.01416.pdf

IROS’19: ReFusion: 3D Reconstruction in Dynamic Environments for RGB-D Cameras… by Palazzolo et al
ReFusion: 3D Reconstruction in Dynamic Environments for RGB-D Cameras Exploiting Residuals by Emanuele Palazzolo, Jens Behley, Philipp Lottes, Philippe Giguere, and Cyrill Stachniss IROS 2019 Arxiv paper: https://arxiv.org/abs/1905.02082 Code release: https://github.com/PRBonn/refusion

IROS’19: SuMa++: Efficient LiDAR-based Semantic SLAM by Chen et al.
SuMa++: Efficient LiDAR-based Semantic SLAM by Xieyuanli Chen, Andres Milioto, Emanuele Palazzolo, Philippe Giguere, Jens Behley, and Cyrill Stachniss IROS 2019
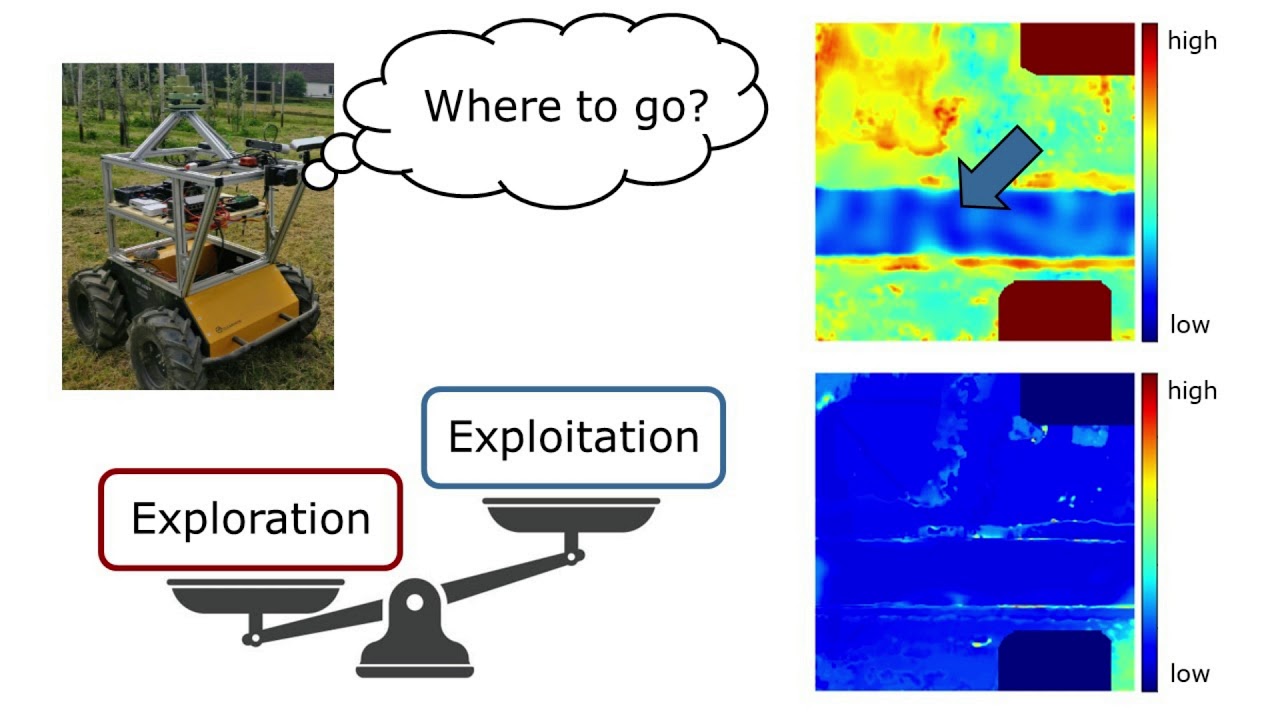
ICRA’19: Actively Improving Robot Navigation On Different Terrains Using GPMMs by Nardi et al.
L. Nardi and C. Stachniss, “Actively Improving Robot Navigation On Different Terrains Using Gaussian Process Mixture Models,” in Proc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA) , 2019. http://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/nardi2019icra-airn.pdf

ICRA’19: Uncertainty-Aware Path Planning for Navigation on Road Networks Using Augmented MDPs
L. Nardi and C. Stachniss, “Uncertainty-Aware Path Planning for Navigation on Road Networks Using Augmented MDPs ,” in Proc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA) , 2019. http://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/nardi2019icra-uapp.pdf

ICRA’19: Robot Localization Based on Aerial Images for Precision Agriculture by Chebrolu et al.
Robot Localization Based on Aerial Images for Precision Agriculture Tasks in Crop Fields by N. Chebrolu, P. Lottes, T. Laebe, and C. Stachniss In Proc. of the IEEE Intl. Conf. on Robotics & Automation (ICRA) , 2019. Paper: http://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/chebrolu2019icra.pdf

RAL’19: Multi-Trajectory Visual Place Recognition in Changing Environments by Vysotska & Stachniss
Multi-Trajectory Visual Place Recognition in Changing Environments by Olga Vysotska and Cyrill Stachniss. See RAL’2019

RangeNet++: Fast and Accurate LiDAR Semantic Segmentation
IROS’2019 submission – Andres Milioto, Ignacio Vizzo, Jens Behley, Cyrill Stachniss. Predictions from Sequence 13 Kitti dataset. Each frame is processed individually, and in under 100ms in a single GPU, under the frame rate of a Velodyne LiDAR scanner. Code and data coming soon. Resources: CODE Slam [SuMa]: https://github.com/jbehley/SuMa CODE Semantics [Lidar-Bonnetal]: https://github.com/PRBonn/lidar-bonnetal Kitti dataset: http://www.cvlibs.net/datasets/kitti/ Semantic dataset: http://semantic-kitti.org We thank NVIDIA Corporation for providing a Quadro P6000 GPU used to support this research.

Escarda Technologies GmbH Concept Video

IROS’18 Workshop: Towards Uncertainty-Aware Path Planning for Navigation by Nardi et al.
L. Nardi and C. Stachniss, “Towards Uncertainty-Aware Path Planning for Navigation on Road Networks Using Augmented MDPs,” in 10th Workshop on Planning, Perception and Navigation for Intelligent Vehicles at the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2018.
RAL’18: FCNs with Sequential Information for Robust Crop and Weed Detection by Lottes et al.
Trailer for the paper: Fully Convolutional Networks with Sequential Information for Robust Crop and Weed Detection in Precision Farming by P. Lottes, J. Behley, A. Milioto, and C. Stachniss, RAL 2018
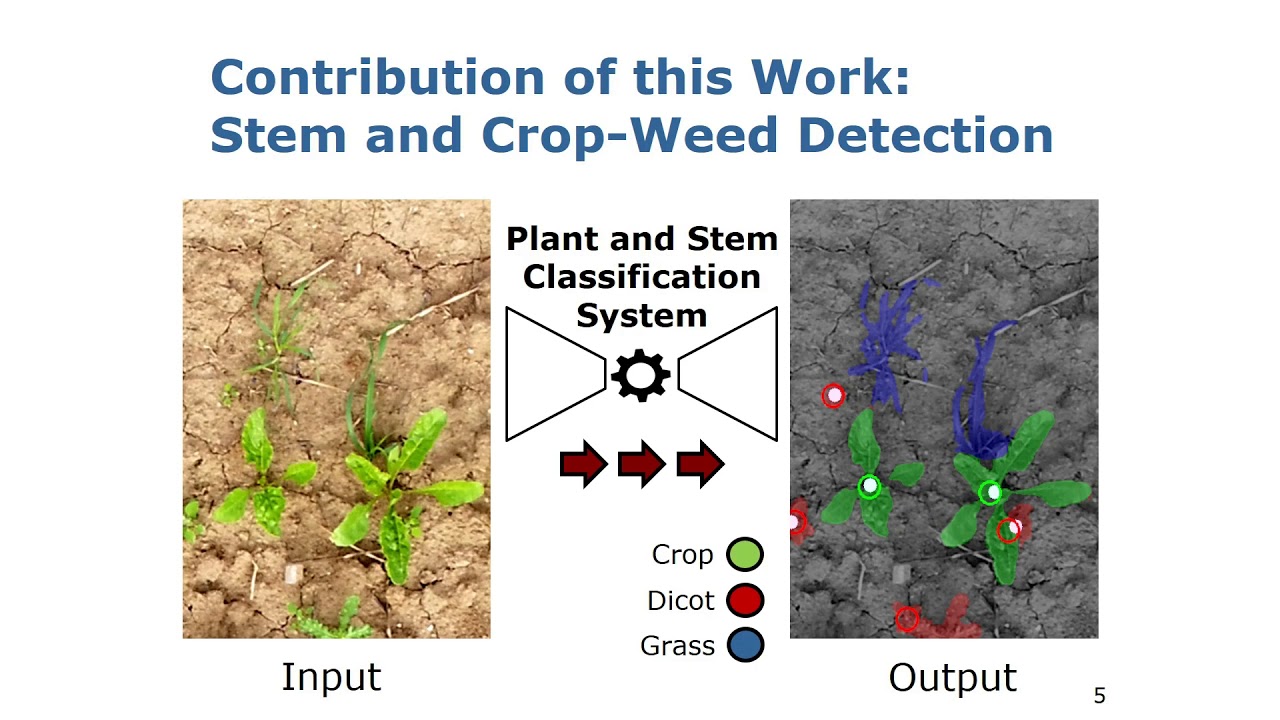
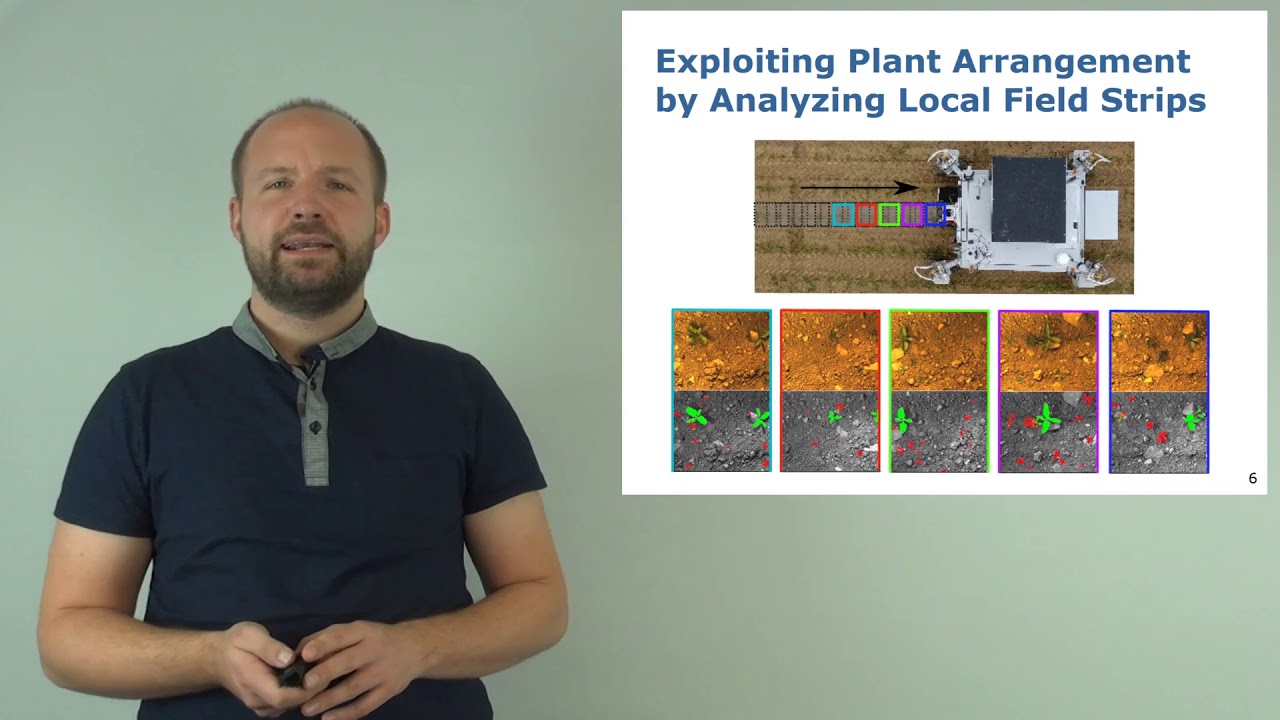
IROS’18: Joint Stem Detection and Crop-Weed Classification for Plant-specific Treatment
Trailer for the paper: Joint Stem Detection and Crop-Weed Classification for Plant-specific Treatment in Precision Farming by P. Lottes, J. Behley, N. Chebrolu, A. Milioto, and C. Stachniss, IROS 2018.

RSS’18: Efficient Surfel-based Mapping using 3D Laser Range Data by Behley & Stachniss
J. Behley and C. Stachniss, “Efficient Surfel-based SLAM using 3D Laser Range Data in Urban Environments,” in Proceedings of Robotics: Science and Systems (RSS), 2018.

Andres about Semantic Segmentation in Brisbane

Bonnet: Prediction of Cityscapes
Bonnet: Prediction of Cityscapes Test Sequences 00, 01, and 02 with 1024x512px Input. Based on: A. Milioto and C. Stachniss, “Bonnet: An Open-Source Training and Deployment Framework for Semantic Segmentation in Robotics using CNNs”, in arXiv, 1802.08960, 2018
Bonnetal – Semantic Segmentation People vs Background by A. Milioto et al.
Model was quantized to INT8 and calibrated for fast GPU inference using TensorRT. Our framework allows for C++ inference (with or without ROS) of real-time CNNs for classification, semantic segmentation, and a variety of other tasks which are coming soon. Code: https://github.com/PRBonn/bonnetal Architecture: MobilenetsV2+ASPP Dataset: COCO (only people) + Supervisely Persons Credit Original Video: https://www.youtube.com/watch?v=OPf0YbXqDm0 Category Science & Technology Suggested by SME Mark Ronson – Uptown Funk (Official Video) ft. Bruno Mars Music in this video Song Uptown Funk (feat. Bruno Mars) Artist Mark Ronson Album NRJ Hit Music Only 2015 Writers Charlie Wilson, Robert Wilson, Lonnie Simmons, Ronnie Wilson, Jeff Bhasker, Nicholas Williams, Mark Ronson, Rudolph Taylor, Philip Lawrence, Devon Gallaspy, Bruno Mars Licensed to YouTube by SME (on behalf of Warner Special Marketing (France)); LatinAutor – Warner Chappell, LatinAutor – PeerMusic, PEDL, Warner Chappell, LatinAutor – SonyATV, União Brasileira de Compositores, LatinAutor, UMPG Publishing, AMRA, New Songs Administration (Publisher), UMPI, Bicycle Music Co. (Publishing), LatinAutor – UMPG, Abramus Digital, CMRRA, UBEM, Broma 16, Global Music Rights LLC, ARESA, BMG Rights Management, Sony ATV Publishing, ASCAP, BMI – Broadcast Music Inc., Kobalt Music Publishing, SOLAR Music Rights Management, and 25 Music Rights Societies
IROS’18: Joint Ego-motion Estimation Using a Laser Scanner and a Monocular Camera
Trailer for the paper: Joint Ego-motion Estimation Using a Laser Scanner and a Monocular Camera Through Relative Orientation Estimation and 1-DoF ICP by K. Huang and C. Stachniss, IROS 2018
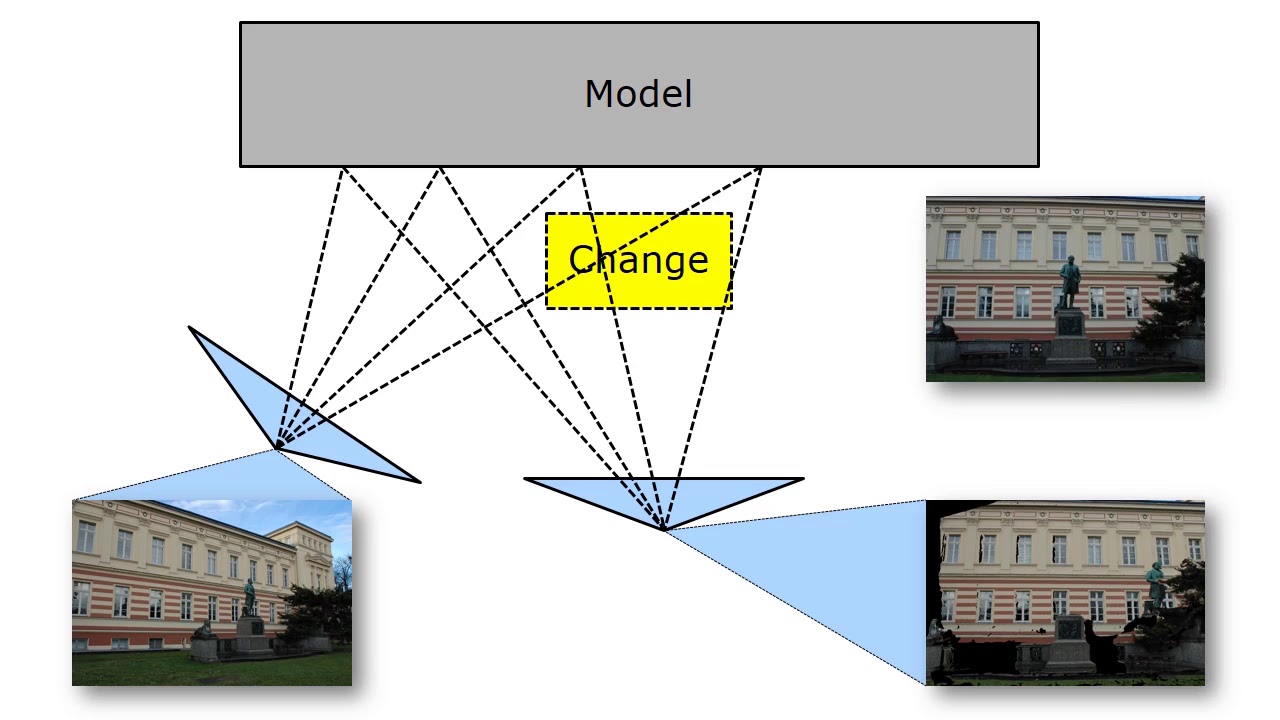
ICRA’18: Fast Image-Based Geometric Change Detection Given a 3D Model by Palazzolo et al.
Video trailer for the paper: E. Palazzolo and C. Stachniss, “Fast Image-Based Geometric Change Detection Given a 3D Model,” in Proceedings of the IEEE Int. Conf. on Robotics & Automation (ICRA), 2018. Paper: http://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/palazzolo2018icra.pdf Code: https://github.com/Photogrammetry-Robotics-Bonn/fast_change_detection/ Data: http://www.ipb.uni-bonn.de/data/changedetection2017/
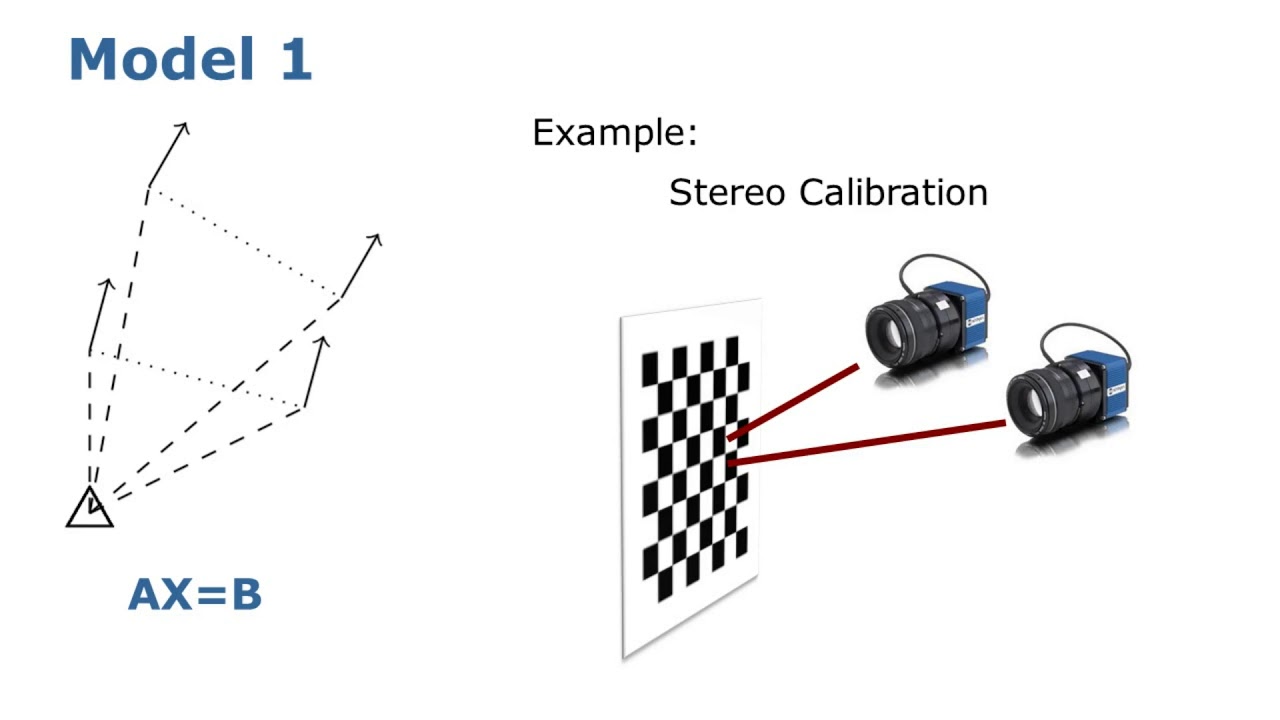
ICRA’18: On Geometric Models and Their Accuracy for Extrinsic Sensor Calibration by Huang et al.
Trailer for the paper On Geometric Models and Their Accuracy for Extrinsic Sensor Calibration by K. Huang and C. Stachniss, ICRA 2018

ICRA’18: Real-time Semantic Segmentation of Crop and Weed for Precision Agriculture Robots …
A. Milioto, P. Lottes, and C. Stachniss, “Real-time Semantic Segmentation of Crop and Weed for Precision Agriculture Robots Leveraging Background Knowledge in CNNs,” Proceedings of the IEEE Int. Conf. on Robotics & Automation (ICRA), 2018. https://arxiv.org/abs/1709.06764

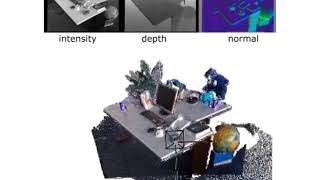
ICRA’18: A General Framework for Flexible Multi-Cue Photometric Point Cloud Registration
B. Della Corte, I. Bogoslavskyi, C. Stachniss, and G. Grisetti, “A General Framework for Flexible Multi-Cue Photometric Point Cloud Registration,” in Proceedings of the IEEE Int. Conf. on Robotics & Automation (ICRA) , 2018. Code: https://gitlab.com/srrg-software/srrg_mpr
ICRA’18: Flexible Multi-Cue Photometric Point Cloud Registration by Della Corte & Bogoslavskyi
MPR: A General Framework for Flexible Multi-Cue Photometric Point Cloud Registration by Bartolomeo Della Corte, Igor Bogoslavskyi, Cyrill Stachniss, Giorgio Grisetti ICRA 2018 PDF: https://arxiv.org/abs/1709.05945 Code:https://gitlab.com/srrg-software/srrg_mpr Abstract: The ability to build maps is a key functionality for the majority of mobile robots. A central ingredient to most mapping systems is the registration or alignment of the recorded sensor data. In this paper, we present a general methodology for photometric registration that can deal with multiple different cues. We provide examples for registering RGBD as well as 3D LIDAR data. In contrast to popular point cloud registration approaches such as ICP our method does not rely on explicit data association and exploits multiple modalities such as raw range and image data streams. Color, depth, and normal information are handled in an uniform manner and the registration is obtained by minimizing the pixel-wise difference between two multi-channel images. We developed a flexible and general framework and implemented our approach inside that framework. We also released our implementation as open source C++ code. The experiments show that our approach allows for an accurate registration of the sensor data without requiring an explicit data association or model-specific adaptations to datasets or sensors. Our approach exploits the different cues in a natural and consistent way and the registration can be done at framerate for a typical range or imaging sensor.
IROS’18: Joint Ego-motion Estimation Using a Laser Scanner and a Monocular Camera
Trailer for the paper: Joint Ego-motion Estimation Using a Laser Scanner and a Monocular Camera Through Relative Orientation Estimation and 1-DoF ICP by K. Huang and C. Stachniss, IROS 2018

Spitzenforschung: Uni Bonn stellt acht Anträge für Exzellenzcluster
Mit Exzellenzclustern möchten Bund und Länder die Spitzenforschung in Deutschland antreiben. Es geht um insgesamt rund 385 Millionen Euro mit denen zwischen 45 und 50 Projekte gefördert werden sollen. Welche die Uni Bonn ins Rennen geschickt hat, das sehen Sie im Video.

PFG’17/IROS’16: Efficient Online Segmentation for Sparse 3D Laser Scans by Bogoslavskyi & Stachniss
I. Bogoslavskyi and C. Stachniss, “Efficient Online Segmentation for Sparse 3D Laser Scans,” PFG — Journal of Photogrammetry, Remote Sensing and Geoinformation Science, pp. 1-12, 2017. as well as I. Bogoslavskyi and C. Stachniss “Fast Range Image-Based Segmentation of Sparse 3D Laser Scans for Online Operation” In Proceedings of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS) , 2016.
RAL-ICRA’16: Lazy Data Association For Image Sequences Matching Under Substantial Appearance Changes
Olga Vysotska and Cyrill Stachniss Lazy Data Association For Image Sequences Matching Under Substantial Appearance Changes IEEE Robotics and Automation Letters (RA-L) and presentation at ICRA 2016, 2016
IROS’16: High-Speed Segmentation of 3D Range Scans by Bogoslavskyi & Stachniss
I. Bogoslavskyi and C. Stachniss “Fast Range Image-Based Segmentation of Sparse 3D Laser Scans for Online Operation” In Proceedings of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS) , 2016.

2016: Graph-Based SLAM using Building Information from Open Street Maps by Vysotska & Stachniss
Graph-Based SLAM using Building Information from Open Street Maps by Olga Vysotska and Cyrill Stachniss, 2016

ICRA’15: Visual Across Season Matching Exploiting Location Priors by Vysotska et al.
O. Vysotska, T. Naseer, L. Spinello, W. Burgard, C. Stachniss: “Efficient and Effective Matching of Image Sequences Under Substantial Appearance Changes Exploiting GPS Priors”, In Proceedings of the IEEE Int. Conf. on Robotics & Automation (ICRA)., pp. 2774-2779. 2015.

2014: Collaborative Filtering for Predicting User Preferences For Organizing Objects by Abdo et al.
by N. Abdo, C. Stachniss, L. Spinello, and W. Burgard, 2014/15

FLOURISH Project: Online sugar beets vs. weed classification on the field (2016)
Related Paper: P. Lottes, M. Hoeferlin, S. Sanders, and C. Stachniss: “Effective Vision-Based Classification for Separating Sugar Beets and Weeds for Precision Farming”, Journal of Field Robotics, 2016

ISPRS Congress Video – DAY 5
Watch the report from the XXIII ISPRS Congress – Day 5

ROVINA Project – Homing Example
Homing example performed in the Priscilla Catacomb in Rome

ROVINA Project: Data Acquisition for Visual Mapping of the Catacombe di Priscilla

MoD Project: Mapping using a monocular camera and the PO Box for georeferencing

MoD Project: Direct georeferencing using PO Box and visual odometry

Rovina Project – Driving up and down the stairs

Rovina Project – Climbing stairs with the new platform
Robot: Modified MESA Element platform by built Algorithmica.IT within the Rovina Project (FP7-ICT-600890)

EUROPA Project: 30s trailer from the downtown navigation event, 2012
A 30s video showing parts of the public downtown navigation experiments of the European Robotic Pedestrian Assistant Obelix.

EUROPA Project – Public final demo, 2012
Public final demo of the EUROPA project, August 2012

EUROPA Project – Test run for the final demo, 2012
Test run for the final demo of the EUROPA project in summer 2012

EUROPA Project – Online mapping and exploration, 2011
Results of the year 3 developed during the EUROPA project funded by the EC in FP7.

EUROPA Project – Autonous navigation from the Freiburg campus to the hospital
Results of the year 2 developed during the EUROPA project funded by the EC in FP7. The robot autonomously navigates from the Freiburg campus to the University hospital

EUROPA Project – Traversability analysis, 2010
Results of the year 2 developed during the EUROPA project funded by the EC in FP7. The videos shows the traversability and vegetation analysis of the robot: yellow=traversable red=obstacle green=vegetation
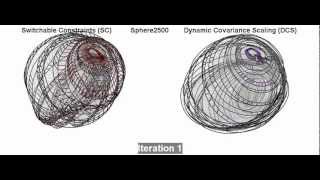
Robust map optimization with outlier constraints – DCS vs. SC, 2012-2013
Pratik Agarwal, Gian Diego Tipaldi, Luciano Spinello, Cyrill Stachniss, and Wolfram Burgard. Robust Map Optimization Using Dynamic Covariance Scaling. In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 2013.

Completing a table scene based on previously observed scenes, 2011-2012
Dominik Joho, Diego Tipald, Nickolas Engelhard, Cyrill Stachniss, and Wolfram Burgard Nonparametric Bayesian Models for Unsupervised Scene Analysis and Reconstruction. In Proc. of Robotics: Science and Systems (RSS), 2012.

PR2 keeping a door open based on actions learnt from demonstration, 2012
Nichola Abdo, Henrik Kretzschmar, Luciano Spinello, and Cyrill Stachniss Learning Manipulation Actions from a Few Demonstrations. In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 2013. Nichola Abdo, Henrik Kertzschmar, and Cyrill Stachniss From Low-Level Trajectory Demonstrations to Symbolic Actions for Planning. In Proc. of the ICAPS Workshop on Combining Task and Motion Planning for Real-World Applications (TAMPRA), 2012.

PR2 solving a planning problem using actions it learnt before by observing a human, 2012
Nichola Abdo, Henrik Kretzschmar, Luciano Spinello, and Cyrill Stachniss Learning Manipulation Actions from a Few Demonstrations. In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 2013. Nichola Abdo, Henrik Kertzschmar, and Cyrill Stachniss From Low-Level Trajectory Demonstrations to Symbolic Actions for Planning. In Proc. of the ICAPS Workshop on Combining Task and Motion Planning for Real-World Applications (TAMPRA), 2012.

Fine localization and positioning with the KUKA OmniRob – Example, 2012
Joerg Roewekaamper, Christoph Sprunk, Gian Diego Tipaldi, Cyrill Stachniss, Patrick Pfaff, and Wolfram Burgard On the Position Accuracy of Mobile Robot Localization based on Particle Filters combined with Scan Matching. In Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2012.

Fine localization and positioning with the KUKA OmniRob – Evaluation experiments, 2012
Joerg Roewekaamper, Christoph Sprunk, Gian Diego Tipaldi, Cyrill Stachniss, Patrick Pfaff, and Wolfram Burgard On the Position Accuracy of Mobile Robot Localization based on Particle Filters combined with Scan Matching. In Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2012.

SLAM – Graph-based SLAM with Node Reduction – Intel, 2011
Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose Graphs for Laser-Based SLAM. International Journal on Robotics Research (IJRR), Volume 31(11), 2012. Cyrill Stachniss and Henrik Kretzschmar Pose Graph Compression for Laser-based SLAM. In Proc. of the Int. Symposium of Robotics Research (ISRR), Flagstaff, AZ, USA, 2011. Invited presentation.

SLAM – Graph-based SLAM – Intel, 2011
Used as the base-line in: Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose Graphs for Laser-Based SLAM. International Journal on Robotics Research (IJRR), Volume 31(11), 2012. Cyrill Stachniss and Henrik Kretzschmar Pose Graph Compression for Laser-based SLAM. In Proc. of the Int. Symposium of Robotics Research (ISRR), Flagstaff, AZ, USA, 2011. Invited presentation.
SLAM – Graph-based SLAM – Freiburg79, 2011
Used as the base-line in: Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose Graphs for Laser-Based SLAM. International Journal on Robotics Research (IJRR), Volume 31(11), 2012. Cyrill Stachniss and Henrik Kretzschmar Pose Graph Compression for Laser-based SLAM. In Proc. of the Int. Symposium of Robotics Research (ISRR), Flagstaff, AZ, USA, 2011. Invited presentation.

SLAM – Graph-based SLAM with Node Reduction – Freiburg79, 2011
Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose Graphs for Laser-Based SLAM. International Journal on Robotics Research (IJRR), Volume 31(11), 2012. Cyrill Stachniss and Henrik Kretzschmar Pose Graph Compression for Laser-based SLAM. In Proc. of the Int. Symposium of Robotics Research (ISRR), Flagstaff, AZ, USA, 2011. Invited presentation.

Learning kinematic models of articulated objects – Dishwasher door, 2009-2011
Juergen Sturm, Cyrill Stachniss, and Wolfram Burgard A probabilistic framework for learning kinematic models of articulated objects. Journal on Artificial Intelligence Research (JAIR), Volume 41, pages 477-526, 2011.
SLAM – Graph-based SLAM – FHW, 2011
Used as the base-line in: Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose Graphs for Laser-Based SLAM. International Journal on Robotics Research (IJRR), Volume 31(11), 2012. Cyrill Stachniss and Henrik Kretzschmar Pose Graph Compression for Laser-based SLAM. In Proc. of the Int. Symposium of Robotics Research (ISRR), Flagstaff, AZ, USA, 2011. Invited presentation.

Octree maps, 2010-2013
Kai Wurm, Armin Hornung, Maren Bennewitz, Cyrill Stachniss, and Wolfram Burgard. OctoMap: A Probabilistic, Flexible, and Compact 3D Map Representation for Robotic Systems. In Proc. of the ICRA 2010 Workshop on Best Practice in 3D Perception and Modeling for Mobile Manipulation, Anchorage, Alaska, 2010. Armin Hornung, Kai M. Wurm, Maren Bennewitz, Cyrill Stachniss, and Wolfram Burgard OctoMap: An Efficient Probabilistic 3D Mapping Framework Based on Octrees. Autonomous Robots, 2013
SLAM – HOG-Man – Two levels of the pose-graph – Stanford garage, 2011
Giorgio Grisetti, Rainer Kümmerle, Cyrill Stachniss, Udo Frese, and Christoph Hertzberg Hierarchical Optimization on Manifolds for Online 2D and 3D Mapping. In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), Anchorage, Alaska, 2010.

SLAM – HOG-Man – Two levels of the pose-graph – Intel , 2011
Giorgio Grisetti, Rainer Kümmerle, Cyrill Stachniss, Udo Frese, and Christoph Hertzberg Hierarchical Optimization on Manifolds for Online 2D and 3D Mapping. In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), Anchorage, Alaska, 2010.

Vision-Based Humanoid Navigation Using Self-Supervised Obstacle Detection, 2011-2013
Daniel Maier, Cyrill Stachniss, and Maren Bennewitz Vision-Based Humanoid Navigation Using Self-Supervised Obstacle Detection. International Journal of Humanoid Robotics, 2013. Daniel Maier, Maren Bennewitz, and Cyrill Stachniss Self-supervised Obstacle Detection for Humanoid Navigation Using Monocular Vision and Sparse Laser Data. In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 2011.

Learning kinematic models of articulated objects – Two drawers, 2009-2011
Juergen Sturm, Cyrill Stachniss, and Wolfram Burgard A probabilistic framework for learning kinematic models of articulated objects. Journal on Artificial Intelligence Research (JAIR), Volume 41, pages 477-526, 2011.

Learning kinematic models of articulated objects – Dishwasher tray, 2009-2011
Juergen Sturm, Cyrill Stachniss, and Wolfram Burgard A probabilistic framework for learning kinematic models of articulated objects. Journal on Artificial Intelligence Research (JAIR), Volume 41, pages 477-526, 2011.

Learning kinematic models of articulated objects – Fridge, 2009-2011
Juergen Sturm, Cyrill Stachniss, and Wolfram Burgard A probabilistic framework for learning kinematic models of articulated objects. Journal on Artificial Intelligence Research (JAIR), Volume 41, pages 477-526, 2011.

Learning kinematic models of articulated objects – Heating, 2009-2011
Juergen Sturm, Cyrill Stachniss, and Wolfram Burgard A probabilistic framework for learning kinematic models of articulated objects. Journal on Artificial Intelligence Research (JAIR), Volume 41, pages 477-526, 2011.

Learning kinematic models of articulated objects – Water tap, 2009-2011
Juergen Sturm, Cyrill Stachniss, and Wolfram Burgard A probabilistic framework for learning kinematic models of articulated objects. Journal on Artificial Intelligence Research (JAIR), Volume 41, pages 477-526, 2011.

Learning kinematic models of articulated objects – Door, 2009-2011
Juergen Sturm, Cyrill Stachniss, and Wolfram Burgard A probabilistic framework for learning kinematic models of articulated objects. Journal on Artificial Intelligence Research (JAIR), Volume 41, pages 477-526, 2011.

Learning kinematic models of articulated objects – Drawer, 2009-2011
Juergen Sturm, Cyrill Stachniss, and Wolfram Burgard A probabilistic framework for learning kinematic models of articulated objects. Journal on Artificial Intelligence Research (JAIR), Volume 41, pages 477-526, 2011.
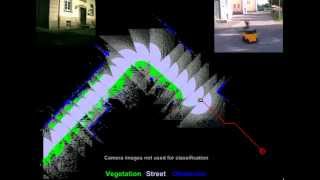
Navigation with online vegetation detection, 2009-2013
Kai Wurm, Henrik Kretzschmar, Rainer Kuemmerle, Cyrill Stachniss, and Wolfram Burgard Identifying Vegetation from Laser Data in Structured Outdoor Environments. Robotics and Autonomous Systems, 2013 Kai M. Wurm, Rainer Kuemmerle, Cyrill Stachniss, and Wolfram Burgard Improving Robot Navigation in Structured Outdoor Environments by Identifying Vegetation from Laser Data. In Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2009.

Planning in environments with deformable objects – Curtain – 2008-2010
Barbara Frank, Cyrill Stachniss, Ruediger Schmedding, Wolfram Burgard, Matthias Teschner Real-world Robot Navigation amongst Deformable Obstacles. In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 2009. Barbara Frank, Markus Becker, Cyrill Stachniss, Matthias Teschner, and Wolfram Burgard Learning Cost Functions for Mobile Robot Navigation in Environments with Deformable Objects. Workshop on Path Planning on Cost Maps at the IEEE International Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 2008.

Planning in environments with deformable objects – Ducks – 2008-2010
Barbara Frank, Cyrill Stachniss, Ruediger Schmedding, Wolfram Burgard, Matthias Teschner Real-world Robot Navigation amongst Deformable Obstacles. In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 2009. Barbara Frank, Markus Becker, Cyrill Stachniss, Matthias Teschner, and Wolfram Burgard Learning Cost Functions for Mobile Robot Navigation in Environments with Deformable Objects. Workshop on Path Planning on Cost Maps at the IEEE International Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 2008.

Planning in environments with deformable objects – Cow – 2008-2010
Barbara Frank, Cyrill Stachniss, Ruediger Schmedding, Wolfram Burgard, Matthias Teschner Real-world Robot Navigation amongst Deformable Obstacles. In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 2009. Barbara Frank, Markus Becker, Cyrill Stachniss, Matthias Teschner, and Wolfram Burgard Learning Cost Functions for Mobile Robot Navigation in Environments with Deformable Objects. Workshop on Path Planning on Cost Maps at the IEEE International Conference on Robotics and Automation (ICRA), Pasadena, CA, USA, 2008.

SLAM – Graph-based SLAM with Gauss-Newton Optimization – FR Campus, 2009-2010
Giorgio Grisetti, Rainer Kuemmerle, Cyrill Stachniss, and Wolfram Burgard A Tutorial on Graph-based SLAM. IEEE Transactions on Intelligent Transportation Systems Magazine. Volume 2(4), pages 31–43, 2010.

Blimp navigation with downlooking camera and online SLAM with TORO, 2007
Batian Steder, Axel Rottmann, Giorgio Grisetti, Cyrill Stachniss, and Wolfram Burgard Autonomous Navigation for Small Flying Vehicles. In Workshop on Micro Aerial Vehicles at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2007.
SLAM – TORO – Sphere Optimization, 2007-2009
Giorgio Grisetti, Cyrill Stachniss, and Wolfram Burgard Non-linear Constraint Network Optimization for Efficient Map Learning. IEEE Transactions on Intelligent Transportation Systems, Volume 10, Issue 3, Pages 428-439, 2009. Giorgio Grisetti, Cyrill Stachniss, Slawomir Grzonka, and Wolfram Burgard A Tree Parameterization for Efficiently Computing Maximum Likelihood Maps using Gradient Descent. Robotics: Science and Systems (RSS), Atlanta, GA, USA, 2007.

Multi-Robot Exploration – Simulation, 2008
Kai M. Wurm, Cyrill Stachniss, and Wolfram Burgard Coordinated Multi-Robot Exploration using a Segmentation of the Environment. In Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2008.

Multi-Robot Exploration – Freiburg79, 2008
Kai M. Wurm, Cyrill Stachniss, and Wolfram Burgard Coordinated Multi-Robot Exploration using a Segmentation of the Environment. In Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2008.

Carrera Racing – Preparing a student project on autonomous slot car racing, 2008
First tests with our Carrera racing track and an onboard camera in Spring 2008

Autonomous Smart car at EPFL, 2006
Autonomous Smart car developed by EPFL, ETH Zurich and University of Freiburg.

Autonomous Smart car at EPF – with taffic , 2006
Autonomous Smart car developed by EPFL, ETH Zurich and University of Freiburg.

Information-Driven Exploration, 2005
Cyrill Stachniss, Giorgio Grisetti, and Wolfram Burgard Information Gain-based Exploration Using Rao-Blackwellized Particle Filters. In Proc. of Robotics: Science and Systems (RSS), pages 65-72, Cambridge, MA, USA, 2005.

SLAM – GMapping – MIT – 2005-2007
Giorgio Grisetti, Cyrill Stachniss, and Wolfram Burgard Improved Techniques for Grid Mapping with Rao-Blackwellized Particle Filters. Transactions on Robotics, Volume 23, pages 34-46, 2007 Cyrill Stachniss, Grisetti Giorgio, Wolfram Burgard, and Nicholas Roy Analyzing Gaussian Proposal Distributions for Mapping with Rao-Blackwellized Particle Filters. In Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2007.

SLAM – GridFastSLAM – Voronoi, 2006
Combines GMapping and Voronoi diagram computation for the best sample by Cyrill Stachniss

Semantic labeling of places, 2005
Axel Rottmann, Oscar Martinez Mozos, Cyrill Stachniss, and Wolfram Burgard Semantic Place Classification of Indoor Environments with Mobile Robots using Boosting. In Proc. of the National Conference on Artificial Intelligence (AAAI), pages 1306-1311, Pittsburgh, PA, USA, 2005.