Abstract
Localization of autonomous vehicles in existing maps is crucial for reliable navigation. Using previously constructed maps allows vehicles to estimate their pose without the inherent odometry drift. Building such maps involves aligning data recorded at different times and maintaining the map over time. While LiDAR sensors are commonly used for mapping due to their high accuracy, they are sensitive to adverse weather and involve high production costs.
In this paper, we address the problem of long-term mapping and localization leveraging automotive radars, which are robust to weather conditions and offer a cost-effective alternative to LiDARs. In our approach, we construct maps of coinciding areas and align them by performing place recognition between them. Additionally, our multi-sequence loop detection and verification strategy for radar sensors is able to filter incorrect loop matches, enhancing trajectory alignment.
Then, our novel map maintenance module handles radar noise and preserves persistent map points that remain reliable for localization. Subsequently, we estimate the robot poses in the resulting map by combining local odometry with scan-to-map matching, overcoming the complexities of sparse automotive radar data. We evaluate our method on public automotive radar datasets. The results show that our approach achieves state-of-the-art trajectory alignment, preserves persistent map points for localization, and reliably localizes within the constructed maps.
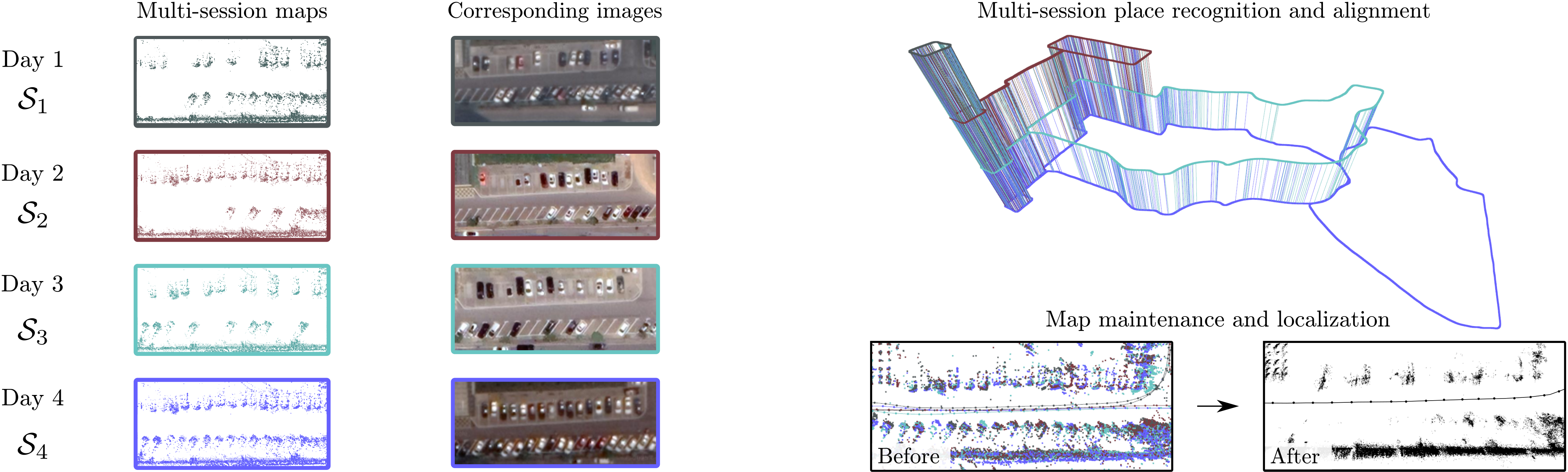
Multi-Session Mapping & Alignment
Multi-session loop detection, verification, and trajectory alignment across different radar datasets.
| Method | 20240113/1 APE | 20240113/1 ARE | 20240123/3 APE | 20240123/3 ARE | 20240113/3 APE | 20240113/3 ARE | 20240115/2 APE | 20240115/2 ARE | 20240116/2 APE | 20240116/2 ARE | Mean APE | Mean ARE |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RaI-SLAM | 0.193 | 0.907 | 3.013 | 1.221 | 12.49 | 1.051 | 6.758 | 0.749 | 45.11 | 2.179 | 13.51 | 1.220 |
| RIV-SLAM | 0.418 | 1.076 | 4.275 | 1.016 | 3.120 | 0.887 | 5.991 | 0.649 | N/A | N/A | - | - |
| LT-Mapper (RIV) | 0.454 | 1.253 | 1.849 | 1.132 | 3.390 | 1.203 | 3.310 | 0.753 | N/A | N/A | - | - |
| Ours (RIV) | 0.206 | 1.075 | 1.568 | 1.049 | 2.512 | 1.009 | 2.544 | 0.582 | N/A | N/A | - | - |
| LT-Mapper (RaI) | 0.197 | 0.924 | 1.821 | 1.096 | 2.648 | 0.666 | 2.575 | 0.698 | 8.998 | 1.160 | 3.248 | 0.900 |
| Ours (RaI) | 0.242 | 0.956 | 1.607 | 0.998 | 2.153 | 0.610 | 2.180 | 0.634 | 9.472 | 1.229 | 3.131 | 0.885 |
| Method | Parking Day1 1 APE | Parking Day1 1 ARE | Parking Day2 1 APE | Parking Day2 1 ARE | Parking Day2 2 APE | Parking Day2 2 ARE | Parking Night APE | Parking Night ARE | Mean APE | Mean ARE |
|---|---|---|---|---|---|---|---|---|---|---|
| RaI-SLAM | 0.622 | 2.575 | 0.466 | 2.412 | 0.576 | 1.015 | 0.774 | 3.256 | 0.609 | 2.314 |
| RIV-SLAM | 0.772 | 2.146 | 0.465 | 2.687 | 6.602 | 2.722 | 0.783 | 3.520 | 2.155 | 2.769 |
| LT-Mapper (RIV) | 3.999 | 9.516 | 1.057 | 4.825 | 1.283 | 6.546 | 1.015 | 3.384 | 1.838 | 6.068 |
| Ours (RIV) | 0.740 | 2.833 | 0.347 | 2.745 | 3.692 | 5.327 | 1.064 | 4.658 | 1.461 | 3.891 |
| LT-Mapper (RaI) | 2.001 | 5.353 | 0.990 | 3.323 | 0.660 | 1.874 | 0.842 | 3.232 | 1.123 | 3.445 |
| Ours (RaI) | 0.610 | 2.516 | 0.571 | 2.530 | 0.620 | 1.383 | 1.275 | 4.196 | 0.769 | 2.656 |
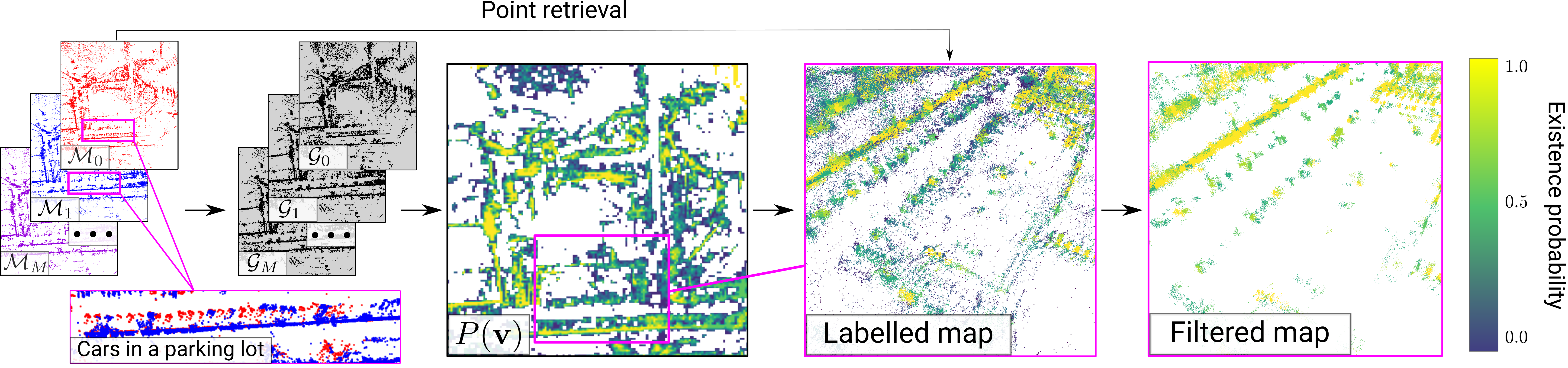
Map Maintenance
Analysis of how our map maintenance strategy preserves reliable points while reducing map size.
| Voxel size | Map type | 20240116_eve/5 Map size | 20240116_eve/5 APE | 20240116_eve/5 ARE | 20240113/1 Map size | 20240113/1 APE | 20240113/1 ARE | 20231208/5 Map size | 20231208/5 APE | 20231208/5 ARE | 20231213/2 Map size | 20231213/2 APE | 20231213/2 ARE |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| None | Not maintained | 149.3 | 1.293 | 1.144 | 165.7 | 0.476 | 1.119 | 159.4 | 1.929 | 0.809 | 167.9 | N/A | N/A |
| Maintained | 106.8 | 1.254 | 1.161 | 119.6 | 0.420 | 1.190 | 124.6 | 1.934 | 0.797 | 131.1 | 1.816 | 1.313 | |
| 0.5 | Not maintained | 58.89 | 1.288 | 1.188 | 62.03 | 0.522 | 1.245 | 81.39 | 1.924 | 0.805 | 83.83 | N/A | N/A |
| Maintained | 34.34 | 1.259 | 1.171 | 35.92 | 0.413 | 1.233 | 57.10 | 1.925 | 0.800 | 58.64 | 1.817 | 1.318 | |
| 1.0 | Not maintained | 24.42 | 1.276 | 1.170 | 25.21 | 0.432 | 1.085 | 38.57 | 1.912 | 0.799 | 39.27 | 1.811 | 1.353 |
| Maintained | 12.21 | 1.274 | 1.155 | 12.46 | 0.360 | 0.977 | 24.23 | 1.917 | 0.816 | 24.58 | 1.812 | 1.340 | |
| 1.5 | Not maintained | 12.99 | 1.286 | 1.122 | 13.31 | 0.476 | 1.089 | 22.03 | 1.926 | 0.892 | 22.35 | 1.825 | 1.424 |
| Maintained | 6.478 | 1.339 | 1.177 | 6.572 | 0.464 | 1.040 | 13.49 | 1.914 | 0.835 | 13.64 | 1.806 | 1.371 |
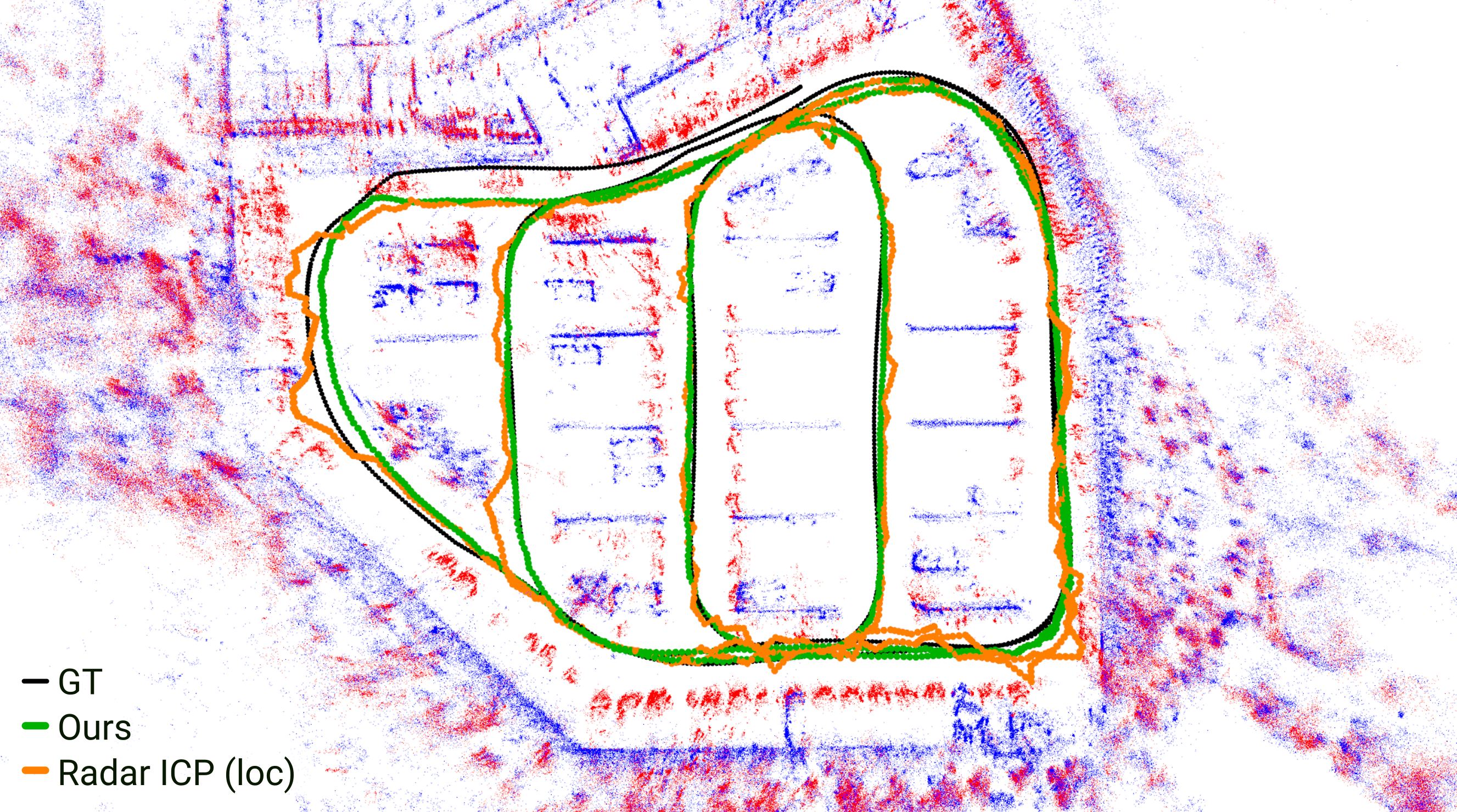
Localization
Evaluation of long-term localization accuracy using radar-based maps across multiple datasets and baselines.
| Method | 20240116_eve/5 APE | 20240116_eve/5 ARE | 20240113/1 APE | 20240113/1 ARE | 20231208/5 APE | 20231208/5 ARE | 20231213/2 APE | 20231213/2 ARE | Mean APE | Mean ARE |
|---|---|---|---|---|---|---|---|---|---|---|
| RaI-SLAM | 3.832 | 1.365 | 0.427 | 1.365 | 23.25 | 2.024 | 26.40 | 2.453 | 13.49 | 1.802 |
| RIV-SLAM | 7.109 | 0.880 | 0.266 | 3.454 | 6.291 | 1.678 | 5.736 | 0.839 | 4.851 | 1.713 |
| Radar ICP (odom) | 4.437 | 1.533 | 1.723 | 2.040 | 18.183 | 1.692 | 24.04 | 2.317 | 12.09 | 1.896 |
| Radar ICP (loc) | 1.262 | 1.190 | 0.393 | 1.298 | 1.929 | 0.800 | N/A | N/A | - | - |
| Ours | 1.270 | 1.172 | 0.328 | 1.342 | 1.926 | 0.776 | 1.854 | 1.387 | 1.345 | 1.170 |
| Method | Parking Day1 1 APE [m] | Parking Day1 1 ARE [°] | Parking Day2 1 APE [m] | Parking Day2 1 ARE [°] | Parking Day2 2 APE [m] | Parking Day2 2 ARE [°] | Parking Night APE [m] | Parking Night ARE [°] | Mean APE [m] | Mean ARE [°] |
|---|---|---|---|---|---|---|---|---|---|---|
| RaI-SLAM | 1.770 | 2.379 | 1.778 | 1.181 | 1.161 | 1.772 | 2.385 | 1.374 | 1.774 | 1.442 |
| RIV-SLAM | 0.787 | 2.230 | 0.487 | 2.799 | 6.644 | 2.920 | 0.847 | 3.054 | 2.191 | 2.751 |
| Radar ICP (odom) | 3.164 | 4.528 | 1.788 | 1.297 | 2.202 | 1.957 | 3.619 | 1.557 | 2.536 | 1.604 |
| Radar ICP (loc) | 1.273 | 2.776 | 1.586 | 1.986 | 1.344 | 2.711 | 2.345 | 6.698 | 1.401 | 2.491 |
| Ours | 1.116 | 2.064 | 1.466 | 1.574 | 1.332 | 1.770 | 2.038 | 6.314 | 1.305 | 1.803 |